【5-2】红外传感&旋转编码计次
红外传感
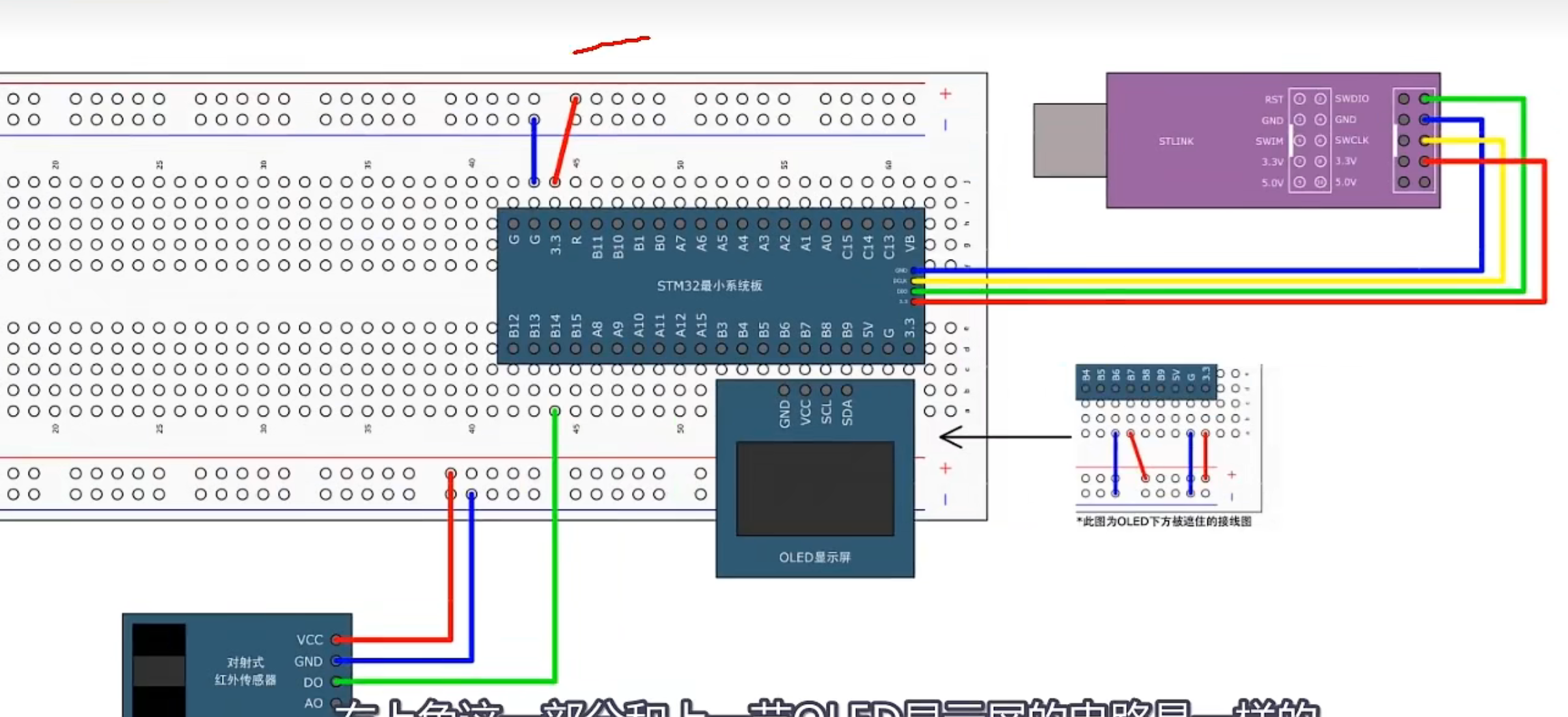
对射式红外传感器计次
接线图
程序实例
CountSensor.h
c
#ifndef __COUNT_SENSOR_H
#define __COUNT_SENSOR_H
void CountSensor_Init(void);
uint16_t CountSonsor_Get(void);
//中断函数不用声明,因为中断函数不需要调用,它是自动执行的
#endifCountSensor.c
c
#include "stm32f10x.h" // Device header
uint16_t CountSonsor_Count;
void CountSensor_Init(void)
{
//进行外部中断的配置
//开启GPIOB的时钟 (注意GPIOB是APB2的外设)
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB,ENABLE);
//开启AFIO的时钟,AFIO也是APB2的外设
RCC_APB2PeriphClockCmd(RCC_APB2Periph_AFIO,ENABLE);
//EXTI和NVIC这两个外设的时钟是一直开着的所以我们不需要自己开启。
//配置GPIO:
GPIO_InitTypeDef GPIO_InitStructrue; //定义结构体
GPIO_InitStructrue.GPIO_Mode = GPIO_Mode_IPU; //上拉输入,默认为高电平
GPIO_InitStructrue.GPIO_Pin = GPIO_Pin_14;
GPIO_InitStructrue.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOB,&GPIO_InitStructrue);//GPIO初始化
//配置AFIO
GPIO_EXTILineConfig(GPIO_PortSourceGPIOB,GPIO_PinSource14);
EXTI_InitTypeDef EXTI_InitStruct; //定义结构体,用于EXTI的初始化
EXTI_InitStruct.EXTI_Line = EXTI_Line14; //指定要配置的中断线
EXTI_InitStruct.EXTI_LineCmd = ENABLE; //指定选择的中断线的新状态
EXTI_InitStruct.EXTI_Mode = EXTI_Mode_Interrupt;//中断模式
EXTI_InitStruct.EXTI_Trigger = EXTI_Trigger_Falling;//下降沿触发
//EXTI初始化
EXTI_Init(&EXTI_InitStruct);
//NVIC分组
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2);
NVIC_InitTypeDef NVIC_InitStruct;//定义结构体,用于NVIC的初始化
NVIC_InitStruct.NVIC_IRQChannel = EXTI15_10_IRQn;//指定中断通道来开启或关闭
NVIC_InitStruct.NVIC_IRQChannelCmd = ENABLE;//指定中断通道是使能(或者失能DISABLE)
NVIC_InitStruct.NVIC_IRQChannelPreemptionPriority = 1;//指定抢占优先级
NVIC_InitStruct.NVIC_IRQChannelSubPriority = 1; //指定响应优先级
//NVIC初始化
NVIC_Init(&NVIC_InitStruct);
}
uint16_t CountSonsor_Get(void)
{
return CountSonsor_Count;
}
//中断函数不用声明,因为中断函数不需要调用,它是自动执行的
void EXTI15_10_IRQHandler(void)
{
//标志位判断
//因为进来此中断函数的是10-15脚,不一定就是14脚,所以要进行标志位判断
if (SET == EXTI_GetFlagStatus(EXTI_Line14))
{
CountSonsor_Count++;
//清除标志位,以防止程序一直申请中断,一直都在中断函数中卡死
EXTI_ClearITPendingBit(EXTI_Line14);
}
}main.c
c
#include "stm32f10x.h" // Device header
#include "Delay.h"
#include "OLED.h"
#include "CountSensor.h"
int main(void)
{
/*模块初始化*/
OLED_Init(); //OLED初始化
CountSensor_Init();
OLED_ShowString(1, 1, "Count:"); //1行3列显示字符串HelloWorld!
while (1)
{
OLED_ShowNum(1,7,CountSonsor_Get(),5);
}
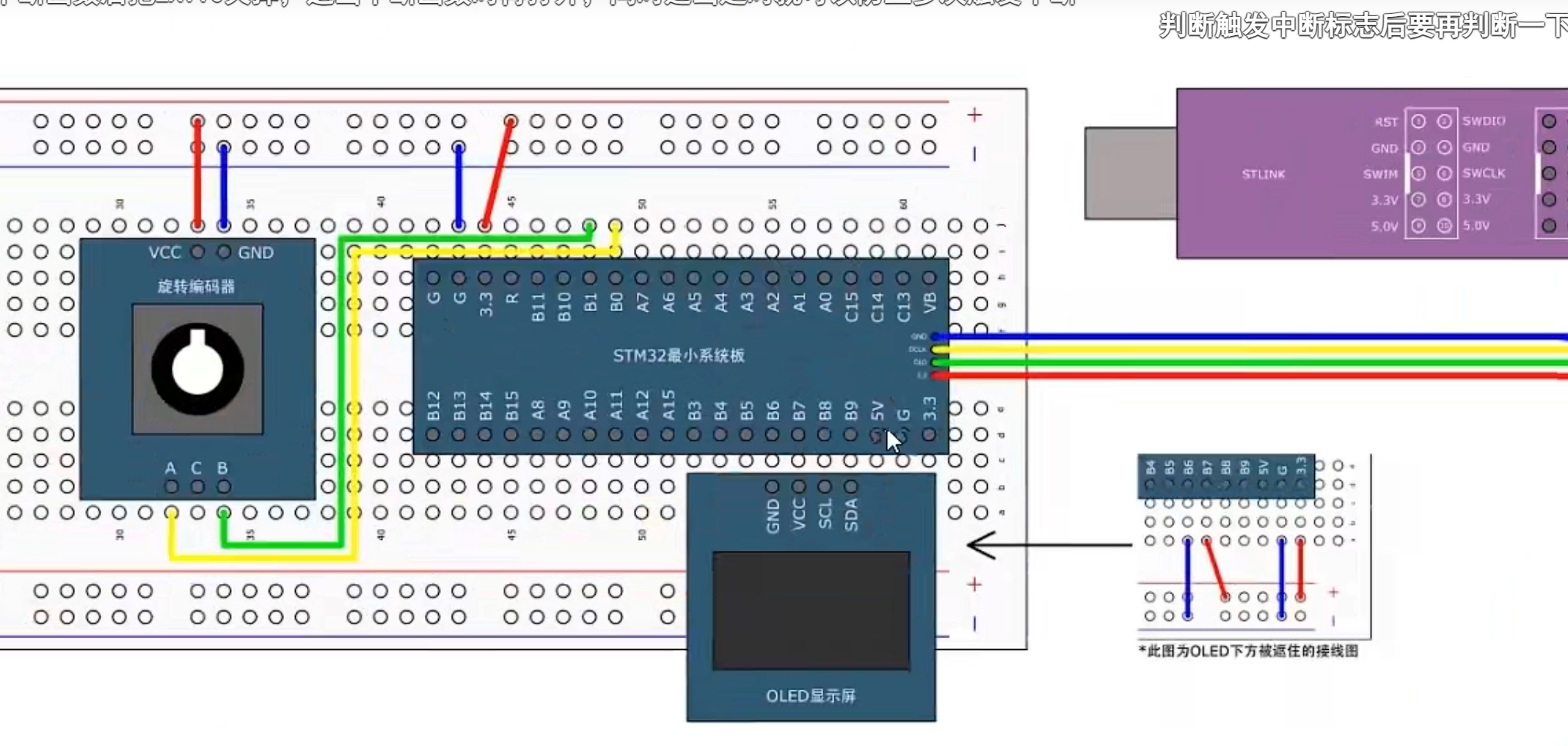
}旋转编码计次
接线图
程序实例
Encoder.h
c
#ifndef __ENCODER_H
#define __ENCODER_H
void Encoder_Init(void);
int16_t Encoder_Get(void);
#endifEncoder.c
c
#include "stm32f10x.h" // Device header
int16_t Encoder_Count;
void Encoder_Init(void)
{
//进行外部中断的配置
//开启GPIOB的时钟 (注意GPIOB是APB2的外设)
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB,ENABLE);
//开启AFIO的时钟,AFIO也是APB2的外设
RCC_APB2PeriphClockCmd(RCC_APB2Periph_AFIO,ENABLE);
//EXTI和NVIC这两个外设的时钟是一直开着的所以我们不需要自己开启。
//配置GPIO:
GPIO_InitTypeDef GPIO_InitStructrue; //定义结构体
GPIO_InitStructrue.GPIO_Mode = GPIO_Mode_IPU; //上拉输入,默认为高电平
GPIO_InitStructrue.GPIO_Pin = GPIO_Pin_0 | GPIO_Pin_1;
GPIO_InitStructrue.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOB,&GPIO_InitStructrue);//GPIO初始化
//配置AFIO
GPIO_EXTILineConfig(GPIO_PortSourceGPIOB,GPIO_PinSource0);
GPIO_EXTILineConfig(GPIO_PortSourceGPIOB,GPIO_PinSource1);
EXTI_InitTypeDef EXTI_InitStruct; //定义结构体,用于EXTI的初始化
EXTI_InitStruct.EXTI_Line = EXTI_Line0 | EXTI_Line1; //指定要配置的中断线
EXTI_InitStruct.EXTI_LineCmd = ENABLE; //指定选择的中断线的新状态
EXTI_InitStruct.EXTI_Mode = EXTI_Mode_Interrupt;//中断模式
EXTI_InitStruct.EXTI_Trigger = EXTI_Trigger_Falling;//下降沿触发
//EXTI初始化
EXTI_Init(&EXTI_InitStruct);
//NVIC分组
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2);
NVIC_InitTypeDef NVIC_InitStruct;//定义结构体,用于NVIC的初始化
NVIC_InitStruct.NVIC_IRQChannel = EXTI0_IRQn;//指定中断通道来开启或关闭
NVIC_InitStruct.NVIC_IRQChannelCmd = ENABLE;//指定中断通道是使能(或者失能DISABLE)
NVIC_InitStruct.NVIC_IRQChannelPreemptionPriority = 1;//指定抢占优先级
NVIC_InitStruct.NVIC_IRQChannelSubPriority = 1; //指定响应优先级
//NVIC初始化
NVIC_Init(&NVIC_InitStruct);
NVIC_InitStruct.NVIC_IRQChannel = EXTI1_IRQn;//指定中断通道来开启或关闭
NVIC_InitStruct.NVIC_IRQChannelCmd = ENABLE;//指定中断通道是使能(或者失能DISABLE)
NVIC_InitStruct.NVIC_IRQChannelPreemptionPriority = 1;//指定抢占优先级
NVIC_InitStruct.NVIC_IRQChannelSubPriority = 2; //指定响应优先级
//NVIC初始化
NVIC_Init(&NVIC_InitStruct);
}
int16_t Encoder_Get(void)
{
int16_t Temp;
Temp = Encoder_Count;
Encoder_Count = 0;
return Temp;
}
void EXTI0_IRQHandler(void)
{
//判断标志位
if (EXTI_GetFlagStatus(EXTI_Line0) == SET)
{
//判断是否为反转
if(GPIO_ReadInputDataBit(GPIOB,GPIO_Pin_1) == 0)
{
Encoder_Count--;
}
//清除标志位
EXTI_ClearITPendingBit(EXTI_Line0);
}
}
void EXTI1_IRQHandler(void)
{
//判断标志位
if (EXTI_GetFlagStatus(EXTI_Line1) == SET)
{
//判断是否为正转
if(GPIO_ReadOutputDataBit(GPIOB,GPIO_Pin_1) == 0)
{
Encoder_Count++;
}
//清除标志位
EXTI_ClearITPendingBit(EXTI_Line1);
}
}main.c
c
#include "stm32f10x.h" // Device header
#include "Delay.h"
#include "OLED.h"
#include "Encoder.h"
uint16_t Num;
int main(void)
{
/*模块初始化*/
OLED_Init(); //OLED初始化
Encoder_Init();
/*OLED显示*/
OLED_ShowString(1, 1, "Num:"); //1行3列显示字符串HelloWorld!
while (1)
{
Num += Encoder_Get();
OLED_ShowSignedNum(1,5,Num,5);
}
}