FreeRTOS操作系统移植教程-原理版
0.RTOS介绍
NOTE
什么是 FreeRTOS?为什么要用它?
在学习移植之前,先搞清楚一个最基本的问题:我们为什么需要 RTOS? 到目前为止,我们写的所有 STM32 程序都是"裸机"程序,结构大概长这样:
int main(void)
{
LED_Init();
OLED_Init();
while (1)
{
// 读传感器
// 刷屏
// 控制电机
// ...
}
}所有功能都塞在一个 while(1) 大循环里,按顺序一个一个执行。这种方式叫轮询(Polling)。它的问题是:如果某个任务耗时较长(比如等待串口数据),后面的任务就得排队等着,整个系统的实时性就变差了。
RTOS(Real-Time Operating System,实时操作系统)的做法不一样:它把程序拆成多个独立的"任务(Task)",由内核的调度器来决定当前该运行哪个任务。每个任务都像是在独占 CPU 一样运行自己的 while(1),调度器在背后快速切换,让它们"同时"运行。
FreeRTOS 是目前最流行的嵌入式 RTOS 之一,代码开源、体积小、移植简单,非常适合 STM32 这类资源有限的单片机。
下面,我们开始把 FreeRTOS 移植到 STM32F103 的标准库工程中。
1.准备资料
去到FreeRTOS官网下载源码:FreeRTOS™ - FreeRTOS™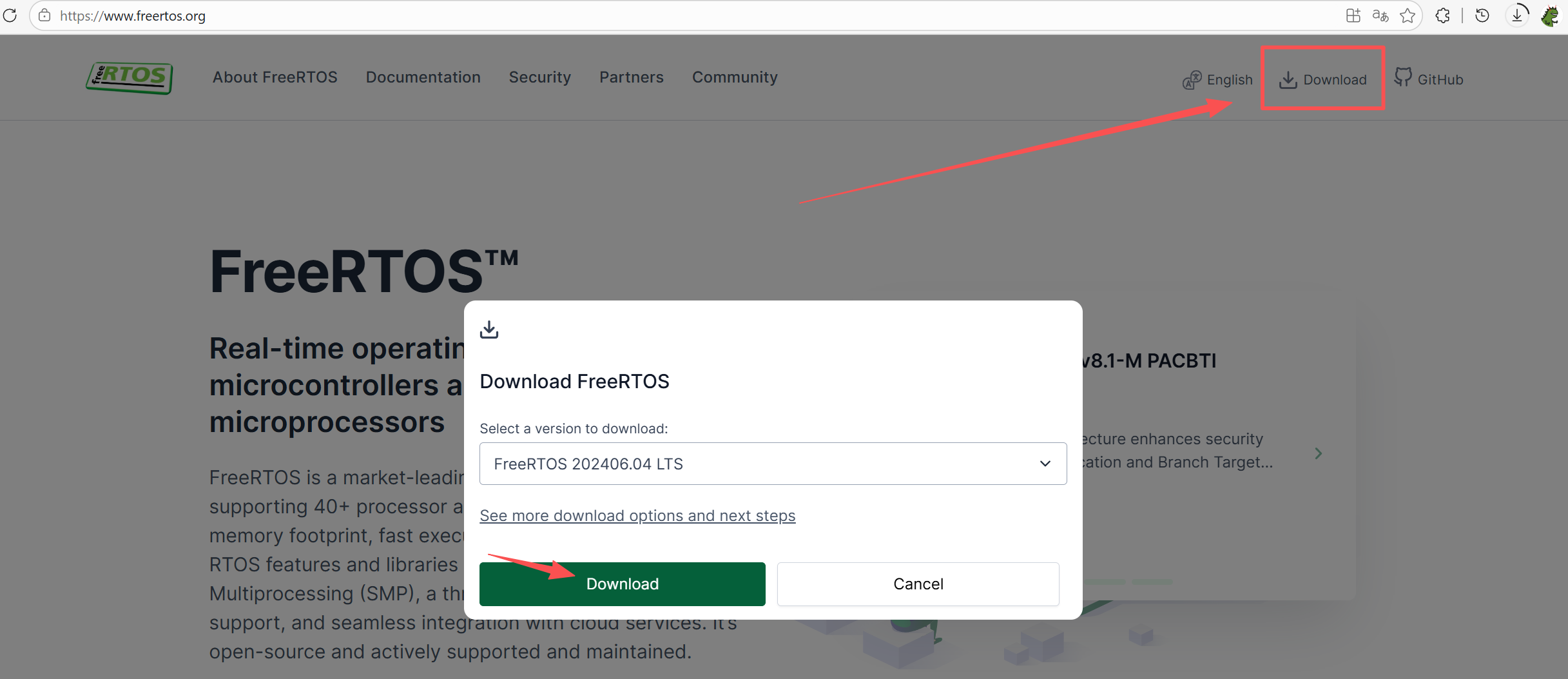
然后准备标准库工程模板: 
即是下面这两个文件: 
NOTE
FreeRTOS 源码的目录结构
在复制文件之前,先花一分钟了解一下 FreeRTOS 源码的组织方式,这样后面的操作你就知道"为什么要从那个目录里拿文件"了。
打开下载好的源码,找到 FreeRTOS-LTS/FreeRTOS/FreeRTOS-Kernel/,这就是 FreeRTOS 的内核目录,里面的结构大致如下:
FreeRTOS-Kernel/
├── include/ ← 内核头文件(FreeRTOS.h、task.h、queue.h 等)
├── portable/ ← 移植适配层(不同芯片/编译器的底层实现)
│ ├── MemMang/ ← 内存管理方案(heap_1.c ~ heap_5.c)
│ ├── RVDS/ ← 针对 Keil (RVDS/ARM Compiler) 的适配
│ │ ├── ARM_CM3/ ← Cortex-M3 内核专用(STM32F103 就是 CM3)
│ │ ├── ARM_CM4F/ ← Cortex-M4 内核专用
│ │ └── ...
│ ├── GCC/ ← 针对 GCC 编译器的适配
│ └── ...
├── croutine.c ← 协程(基本不用)
├── event_groups.c ← 事件组
├── list.c ← 链表(内核基础数据结构)
├── queue.c ← 队列(也是信号量、互斥锁的底层实现)
├── stream_buffer.c ← 流缓冲区
├── tasks.c ← 任务管理(内核最核心的文件)
└── timers.c ← 软件定时器可以看到,FreeRTOS 的内核其实就分成三部分: 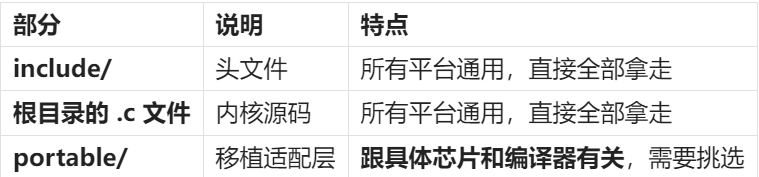 这就是为什么我们接下来要在工程里新建三个文件夹:
这就是为什么我们接下来要在工程里新建三个文件夹:
- inc → 对应
include/,放头文件 - src → 对应根目录的那些
.c文件,放内核源码 - port → 对应
portable/,放跟我们芯片和编译器相关的适配代码
理解了这个结构,后面复制文件的时候就不是在"照搬步骤",而是知道每个文件是从哪来的、为什么要放到那里。
首先,我们在工程模板里新建一个FreeRTOS的文件夹: 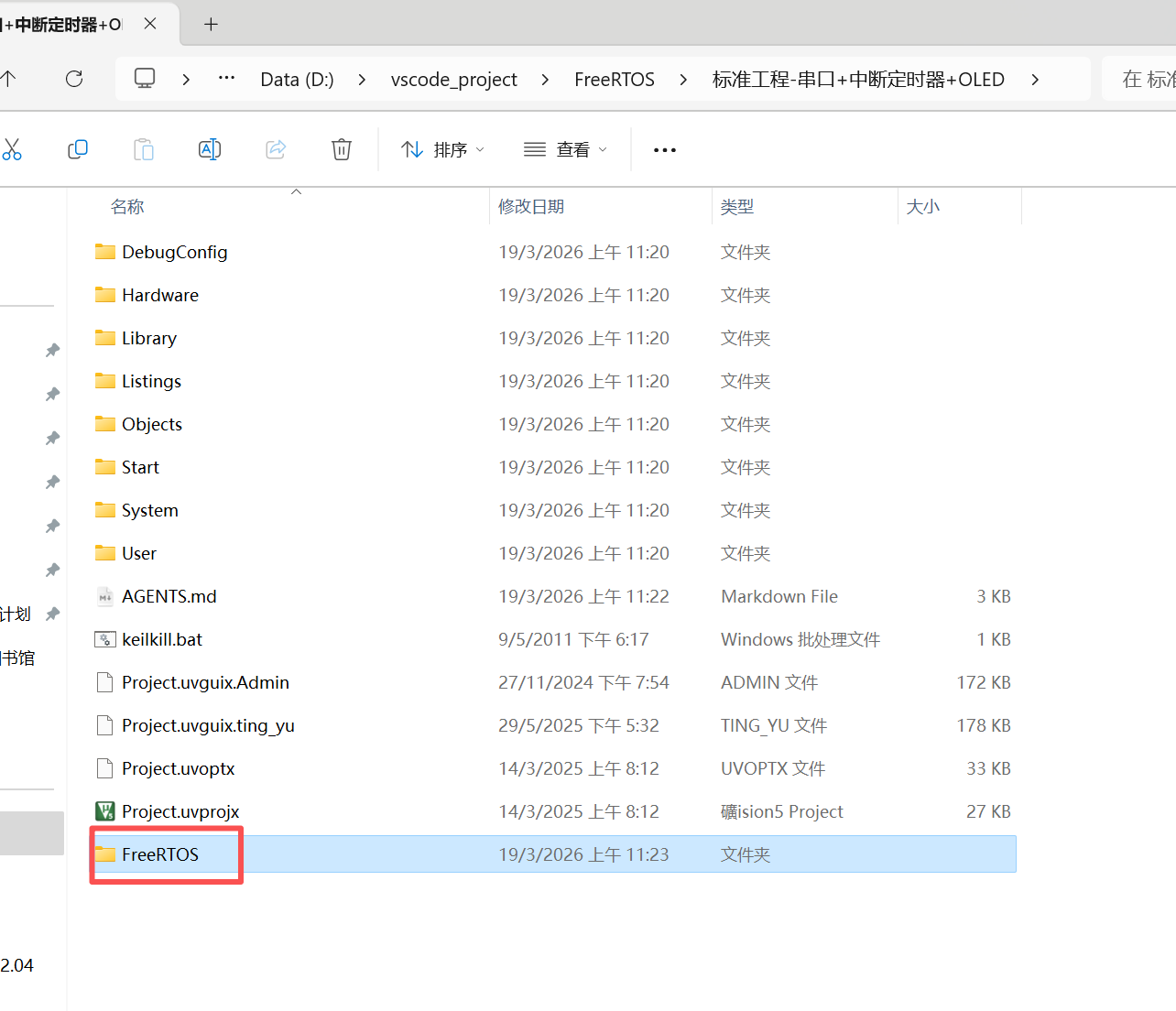 然后再在FreeRTOS中新建三个文件夹:分别是inc、port、src
然后再在FreeRTOS中新建三个文件夹:分别是inc、port、src 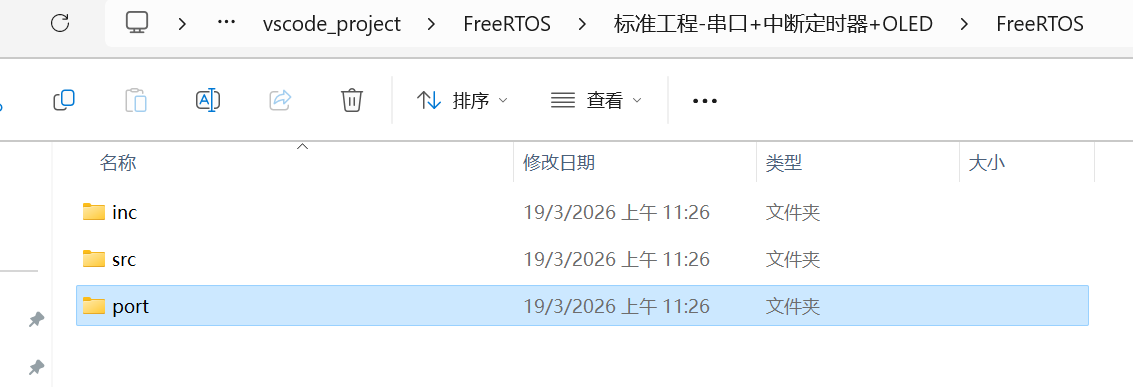
然后,去到Free RTOS源码的下面的目录中:
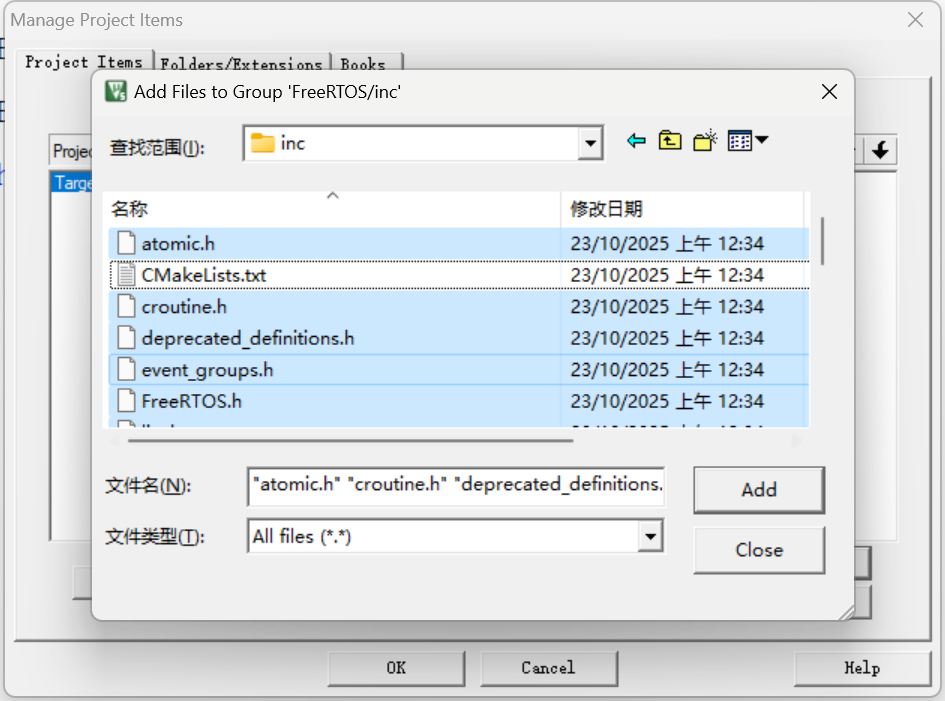
FreeRTOS\FreeRTOS-LTS\FreeRTOS\FreeRTOS-Kernel\include把该目录下的所有文件全部复制到inc文件夹中: 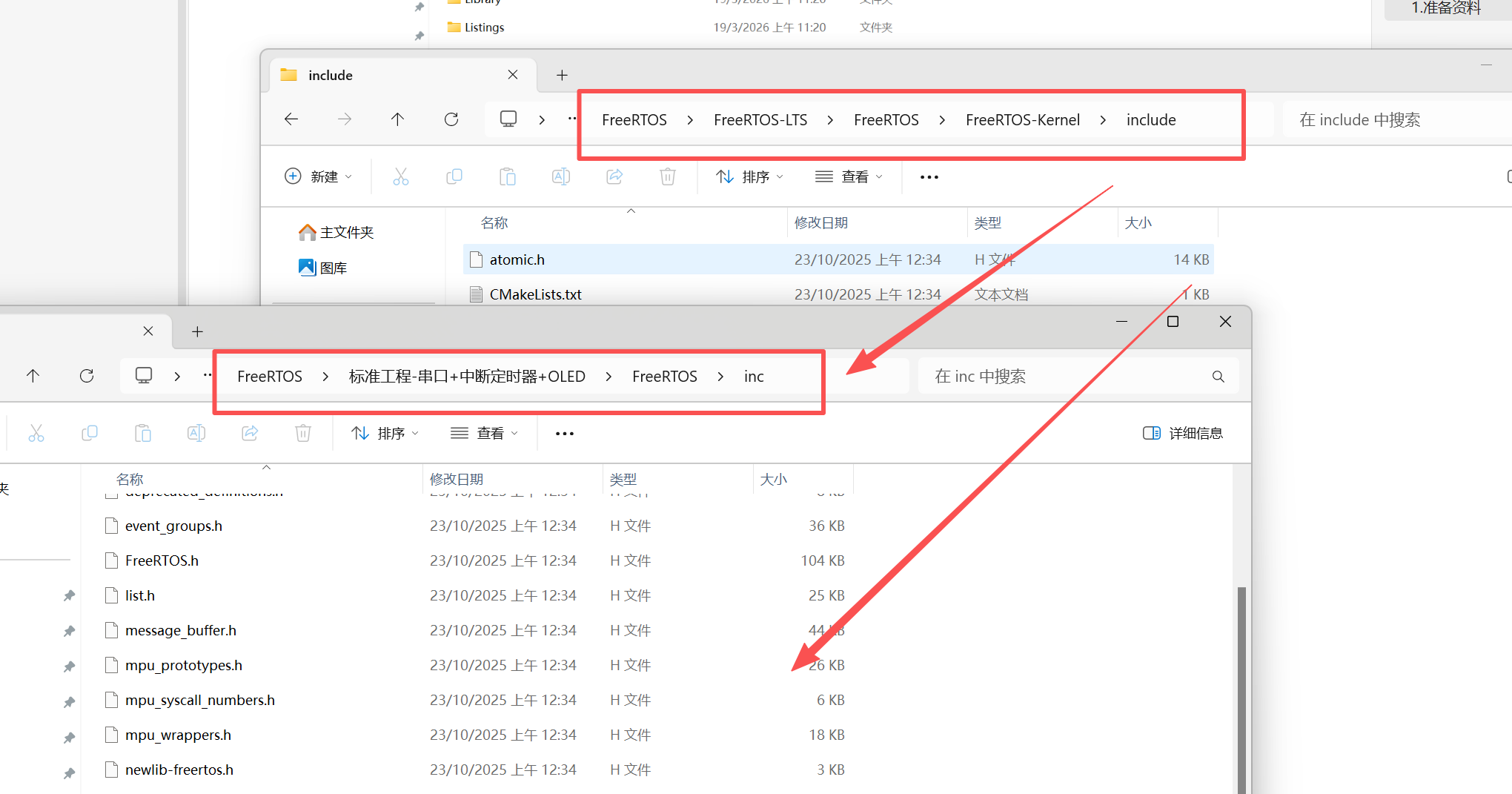
然后,再去到MemMang文件夹,复制到port文件夹下: 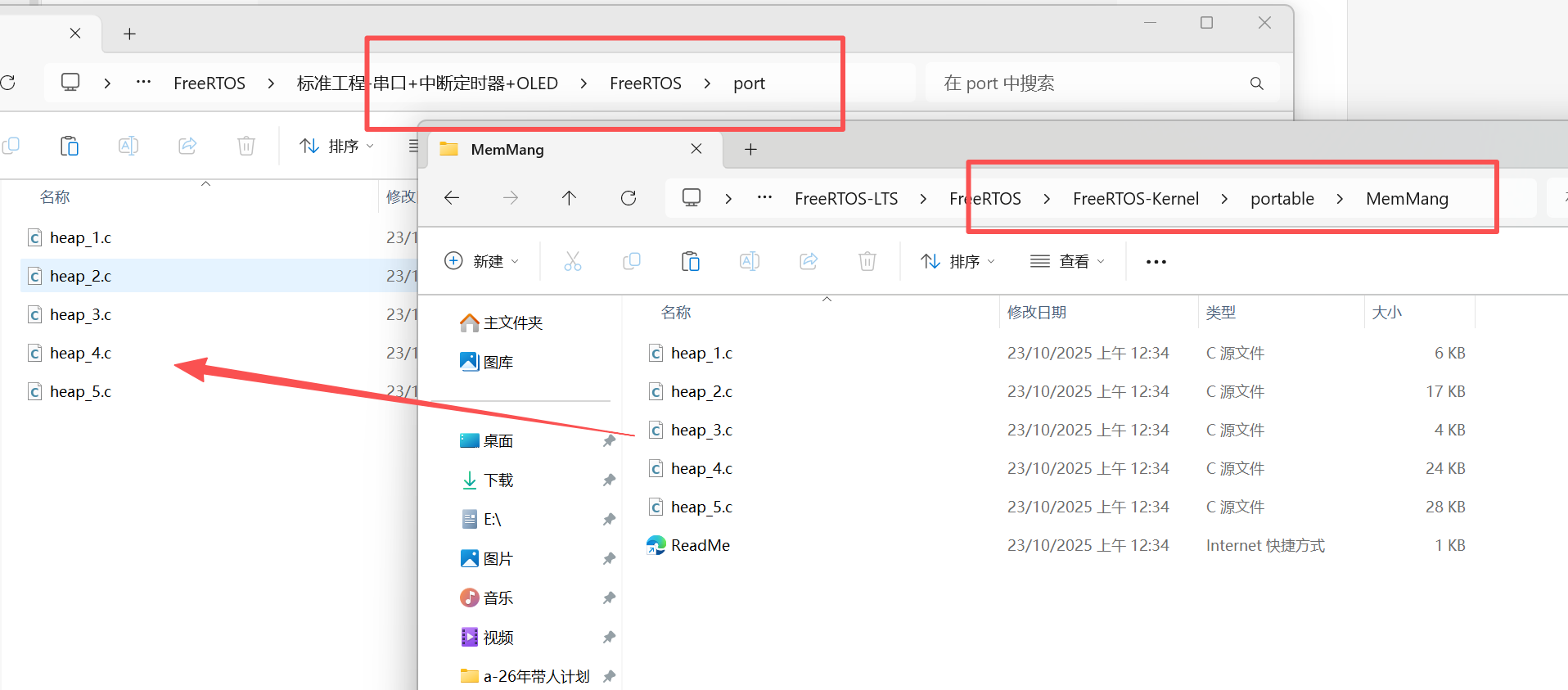
同样的,复制RVDS/ARM_CM3的所有文件到port文件夹: 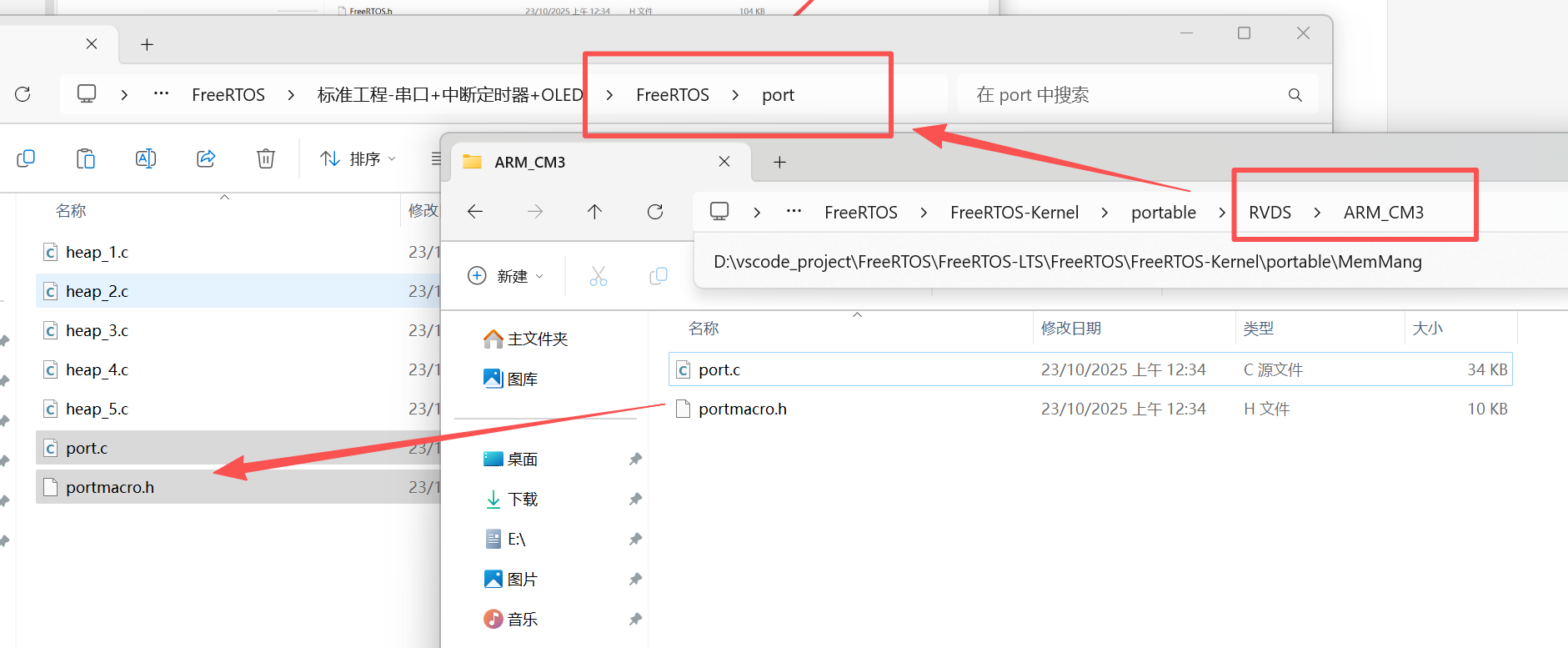
NOTE
为什么选 RVDS/ARM_CM3?
你可能注意到 portable/ 目录下有很多文件夹:GCC、RVDS、IAR……这些对应的是不同的编译器。我们用的是 Keil,Keil 底层的编译器就是 ARM 公司的 RVDS(现在叫 ARM Compiler),所以选 RVDS/ 目录。
进入 RVDS/ 之后又看到 ARM_CM0、ARM_CM3、ARM_CM4F 等子目录,这些对应的是不同的 ARM 内核架构。STM32F103 使用的是 Cortex-M3 内核,所以选 ARM_CM3/。
这两个文件里的内容是什么?
- port.c — 实现了 FreeRTOS 在 Cortex-M3 上运行所需的底层操作,包括:启动第一个任务、触发上下文切换(任务之间的 CPU 切换)、配置 SysTick 定时器等。里面有不少汇编代码,因为这些操作涉及直接操纵 CPU 寄存器,C 语言做不了。
- portmacro.h — 定义了一些与硬件相关的基本类型和宏,比如
TickType_t用多少位、临界区怎么进出等。
简单说:port.c 和 portmacro.h 就是 FreeRTOS 内核与具体硬件之间的"翻译层"。内核本身不关心你用的是什么芯片,这两个文件负责告诉内核怎么在你的芯片上完成那些底层操作。
如果你以后换了芯片(比如 STM32F407,Cortex-M4F 内核),只需要把这两个文件换成 ARM_CM4F/ 目录下的版本就行,内核代码完全不用动。
然后,回到FreeRTOS-Kernel文件夹,将当前文件夹下的下面几个文件复制到src文件夹当中: 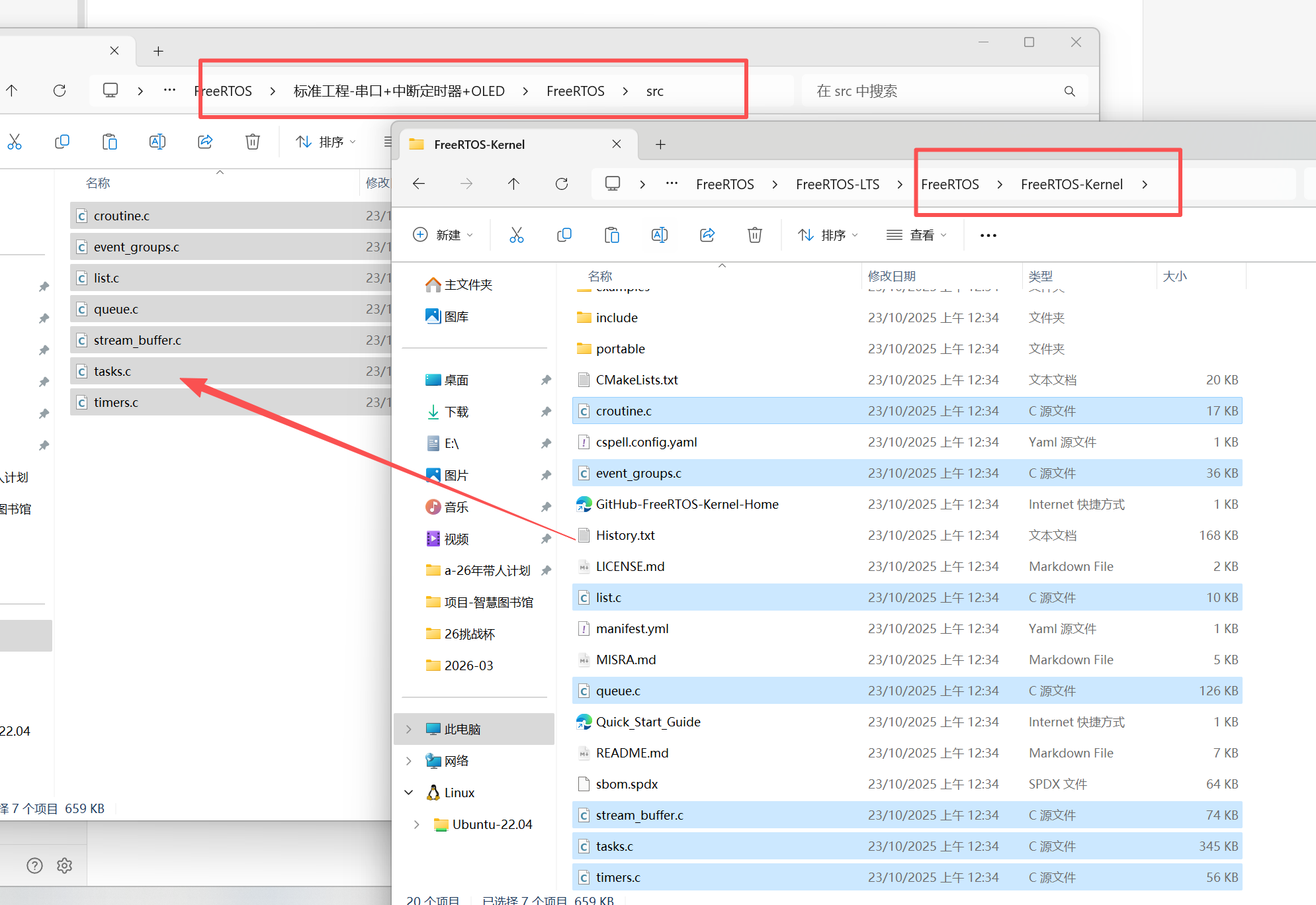
然后,将STM32F103专门配套的config配置文件放到下面的目录下,因为最新版本的FreeRTOS当中并没有附带该文件了,所以这里我们手动创建一个,名称为FreeRTOSConifg.h,内容如下:
/*
* FreeRTOS V202107.00
* Copyright (C) 2020 Amazon.com, Inc. or its affiliates. All Rights Reserved.
*
* Permission is hereby granted, free of charge, to any person obtaining a copy of
* this software and associated documentation files (the "Software"), to deal in
* the Software without restriction, including without limitation the rights to
* use, copy, modify, merge, publish, distribute, sublicense, and/or sell copies of
* the Software, and to permit persons to whom the Software is furnished to do so,
* subject to the following conditions:
*
* The above copyright notice and this permission notice shall be included in all
* copies or substantial portions of the Software.
*
* THE SOFTWARE IS PROVIDED "AS IS", WITHOUT WARRANTY OF ANY KIND, EXPRESS OR
* IMPLIED, INCLUDING BUT NOT LIMITED TO THE WARRANTIES OF MERCHANTABILITY, FITNESS
* FOR A PARTICULAR PURPOSE AND NONINFRINGEMENT. IN NO EVENT SHALL THE AUTHORS OR
* COPYRIGHT HOLDERS BE LIABLE FOR ANY CLAIM, DAMAGES OR OTHER LIABILITY, WHETHER
* IN AN ACTION OF CONTRACT, TORT OR OTHERWISE, ARISING FROM, OUT OF OR IN
* CONNECTION WITH THE SOFTWARE OR THE USE OR OTHER DEALINGS IN THE SOFTWARE.
*
* http://www.FreeRTOS.org
* http://aws.amazon.com/freertos
*
* 1 tab == 4 spaces!
*/
#ifndef FREERTOS_CONFIG_H
#define FREERTOS_CONFIG_H
/*-----------------------------------------------------------
* Application specific definitions.
*
* These definitions should be adjusted for your particular hardware and
* application requirements.
*
* THESE PARAMETERS ARE DESCRIBED WITHIN THE 'CONFIGURATION' SECTION OF THE
* FreeRTOS API DOCUMENTATION AVAILABLE ON THE FreeRTOS.org WEB SITE.
*
* See http://www.freertos.org/a00110.html
*----------------------------------------------------------*/
#define configUSE_PREEMPTION 1
#define configUSE_IDLE_HOOK 0
#define configUSE_TICK_HOOK 0
#define configCPU_CLOCK_HZ ( ( unsigned long ) 72000000 )
#define configTICK_RATE_HZ ( ( TickType_t ) 1000 )
#define configMAX_PRIORITIES ( 5 )
#define configMINIMAL_STACK_SIZE ( ( unsigned short ) 128 )
#define configTOTAL_HEAP_SIZE ( ( size_t ) ( 17 * 1024 ) )
#define configMAX_TASK_NAME_LEN ( 16 )
#define configUSE_TRACE_FACILITY 0
#define configUSE_16_BIT_TICKS 0
#define configIDLE_SHOULD_YIELD 1
/* Co-routine definitions. */
#define configUSE_CO_ROUTINES 0
#define configMAX_CO_ROUTINE_PRIORITIES ( 2 )
/* Set the following definitions to 1 to include the API function, or zero
to exclude the API function. */
#define INCLUDE_vTaskPrioritySet 1
#define INCLUDE_uxTaskPriorityGet 1
#define INCLUDE_vTaskDelete 1
#define INCLUDE_vTaskCleanUpResources 0
#define INCLUDE_vTaskSuspend 1
#define INCLUDE_vTaskDelayUntil 1
#define INCLUDE_vTaskDelay 1
/* This is the raw value as per the Cortex-M3 NVIC. Values can be 255
(lowest) to 0 (1?) (highest). */
#define configKERNEL_INTERRUPT_PRIORITY 255
/* !!!! configMAX_SYSCALL_INTERRUPT_PRIORITY must not be set to zero !!!!
See http://www.FreeRTOS.org/RTOS-Cortex-M3-M4.html. */
#define configMAX_SYSCALL_INTERRUPT_PRIORITY 191 /* equivalent to 0xb0, or priority 11. */
/* This is the value being used as per the ST library which permits 16
priority values, 0 to 15. This must correspond to the
configKERNEL_INTERRUPT_PRIORITY setting. Here 15 corresponds to the lowest
NVIC value of 255. */
#define configLIBRARY_KERNEL_INTERRUPT_PRIORITY 15
#endif /* FREERTOS_CONFIG_H */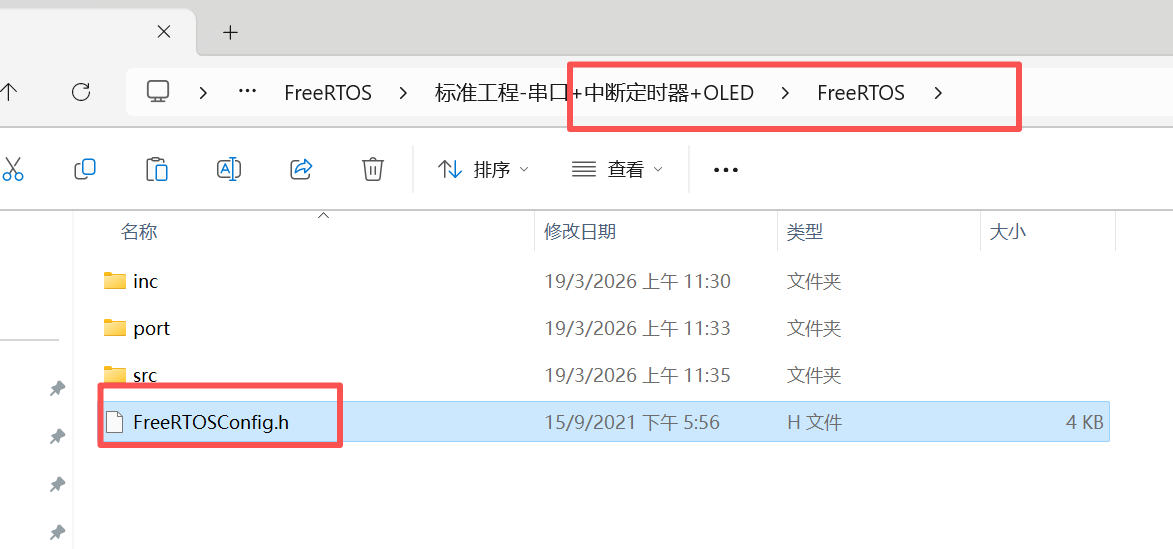
NOTE
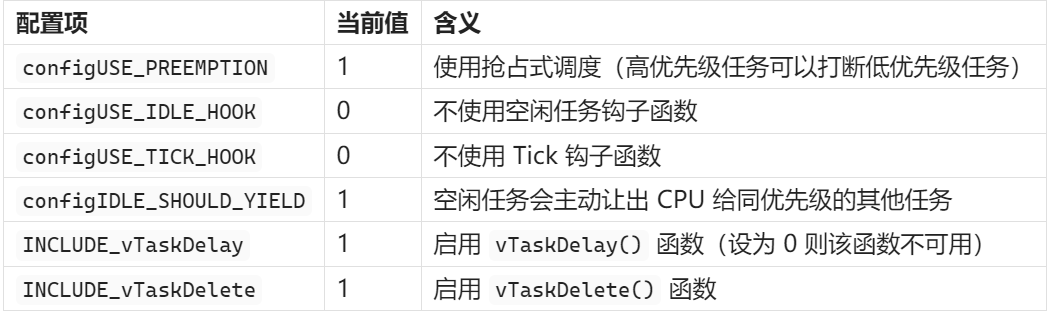
FreeRTOSConfig.h 关键配置项解读
这个文件是整个 FreeRTOS 的"总开关",内核的几乎所有行为都由它控制。你不需要现在就记住每一项,但下面这几个参数务必理解,因为配错了轻则功能异常,重则直接 HardFault:
#define configCPU_CLOCK_HZ ( ( unsigned long ) 72000000 )CPU 主频,单位 Hz。STM32F103 默认跑 72MHz,所以填 72000000。这个值必须和你实际的系统时钟一致,否则 FreeRTOS 的时间基准会全部算错——比如你写 vTaskDelay(500) 想延时 500ms,实际可能变成 250ms 或 1000ms。
#define configTICK_RATE_HZ ( ( TickType_t ) 1000 )系统节拍频率,即 SysTick 中断每秒触发多少次。设为 1000 表示每 1ms 中断一次,也就是说 FreeRTOS 的时间精度是 1ms。vTaskDelay(500) 就是延时 500 个 Tick = 500ms。这个值设太高会增加中断开销,设太低会降低时间精度,1000 是最常用的值。
#define configMAX_PRIORITIES ( 5 )任务优先级的最大数量。优先级从 0(最低)到 configMAX_PRIORITIES - 1(最高)。设为 5 意味着你可以用 0~4 这 5 个优先级。对于入门项目来说足够了,后面根据需要可以加大。
#define configMINIMAL_STACK_SIZE ( ( unsigned short ) 128 )空闲任务(Idle Task)的栈大小,单位是 Word(字),不是 Byte(字节)。128 Word = 128 × 4 = 512 Byte。这是 FreeRTOS 自带的空闲任务使用的栈大小,一般不需要改。但注意:你自己用 xTaskCreate 创建任务时,第三个参数的栈大小也是以 Word 为单位的,这是很多初学者踩的坑。
#define configTOTAL_HEAP_SIZE ( ( size_t ) ( 17 * 1024 ) )FreeRTOS 可用的总堆内存,单位是 Byte。设为 17KB。STM32F103VET6 有 64KB RAM,这里拿出 17KB 给 FreeRTOS 用来创建任务、队列等。如果你创建任务时返回失败(返回 NULL),第一件事就是来看这个值够不够大。但也不能设太大,得给全局变量、栈等留足空间。
其他几个常见的:
底部那三个中断优先级相关的宏(configKERNEL_INTERRUPT_PRIORITY 等),我们在下一章修改配置时再详细说。
2.工程配置
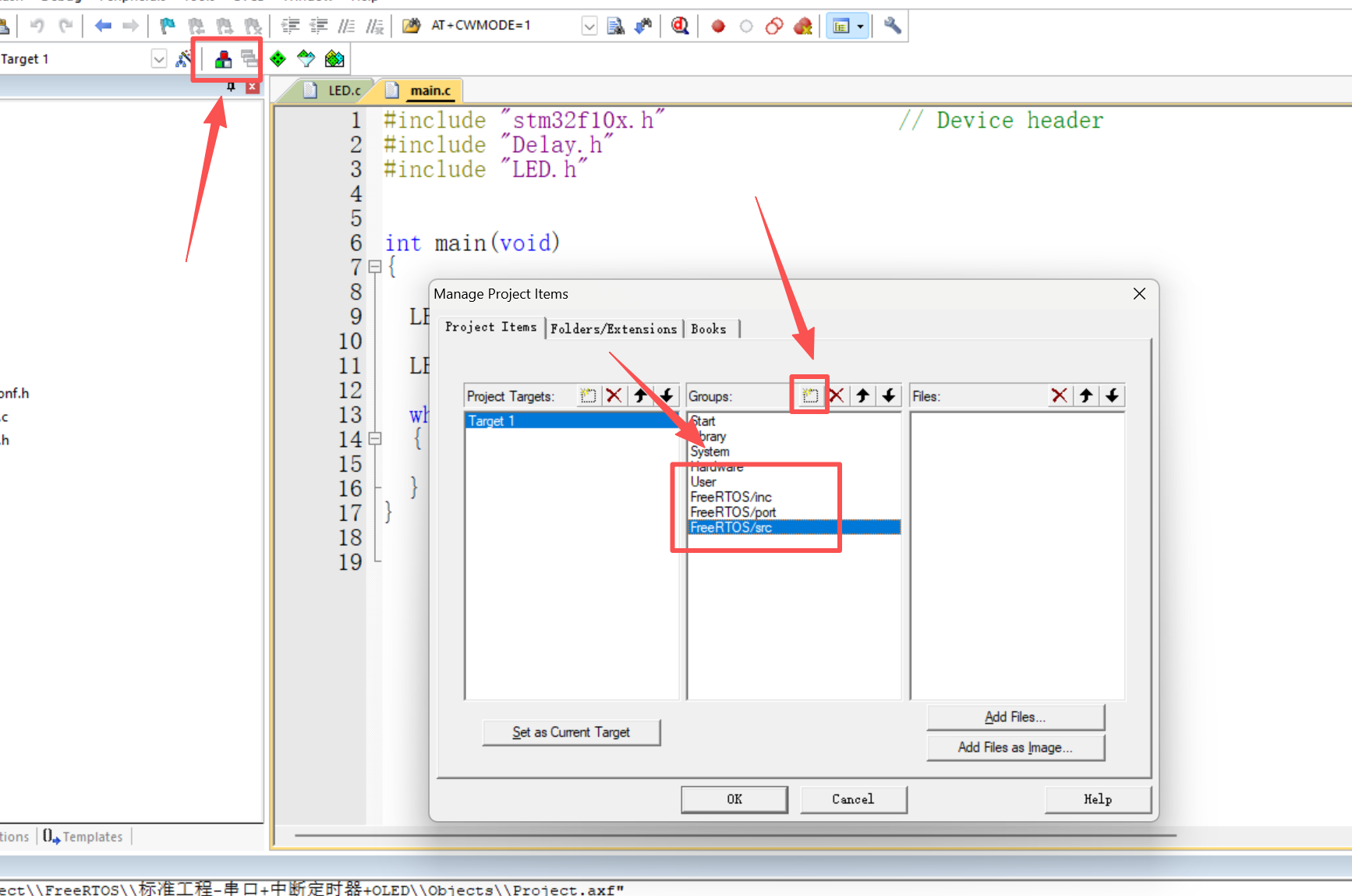
然后,把每个文件夹对应的文件都添加进去,非.c和.h类型的文件可以不需要添加进去 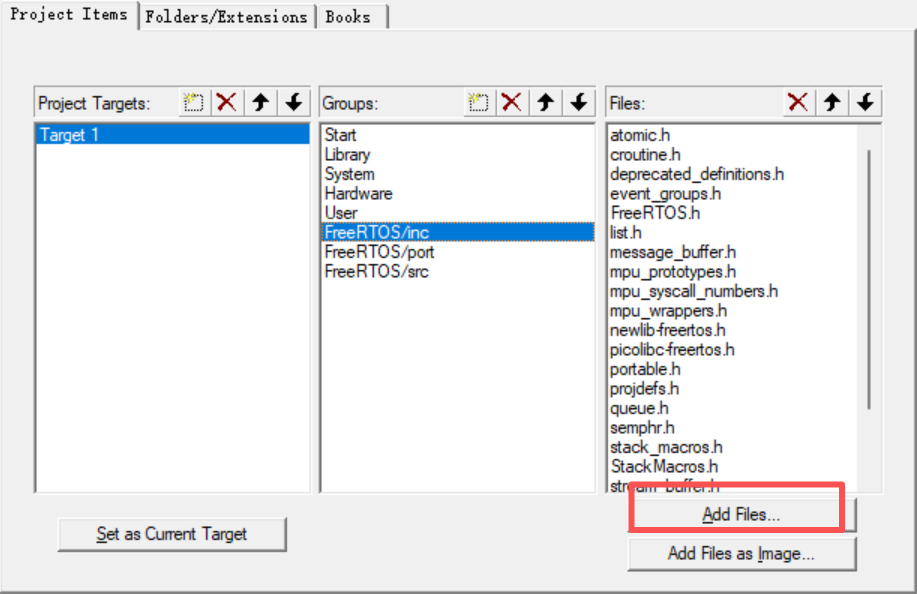
inc、port、src都要添加进去
NOTE
port部分只需要加入heap4和port.c、portmacro.h 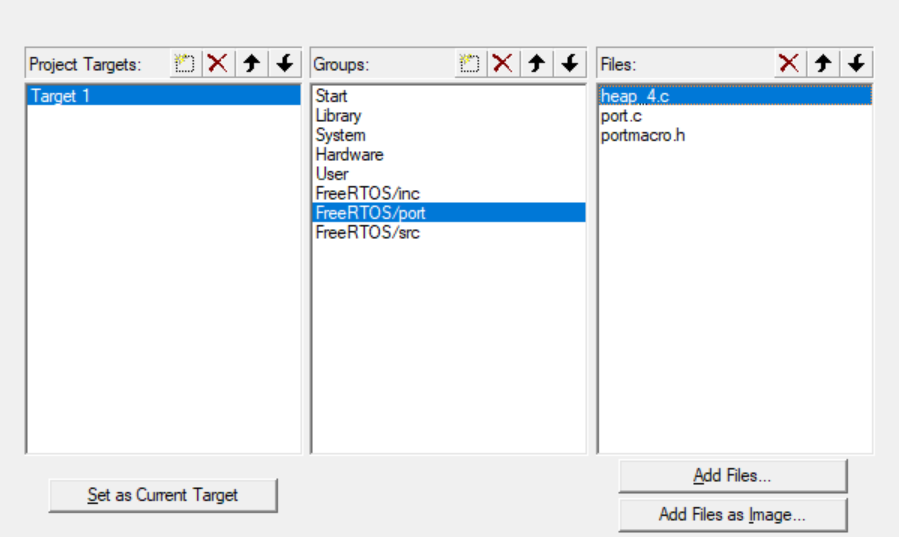
NOTE
为什么选 heap_4.c?
MemMang 目录下有 5 个文件:heap_1.c 到 heap_5.c,它们是 FreeRTOS 提供的 5 种内存管理方案。为什么需要选?因为 FreeRTOS 创建任务、队列、信号量等都需要动态分配内存,而单片机上没有 Linux 那样的 malloc,所以 FreeRTOS 自己实现了内存分配。
5 种方案的区别:

heap_4 支持分配、释放,还能把相邻的空闲块合并起来减少碎片,对于 STM32F103 这种只有一块连续 RAM 的芯片来说,它是最实用的选择。你以后的项目如果没有特殊需求,选 heap_4 就对了。
NOTE
为什么 port 组只添加这三个文件?
我们从 MemMang 复制了 heap_1.c 到 heap_5.c 共 5 个文件到 port 文件夹,但加入工程时只添加了 heap_4.c。原因很简单:这 5 个文件都实现了同一组函数(pvPortMalloc 和 vPortFree),如果同时加入多个,链接时会报"重复定义"错误。你选了哪种方案,就只加哪个 .c 文件。
port.c 和 portmacro.h 则是 Cortex-M3 的硬件适配层,前面已经介绍过,是必须加入的。
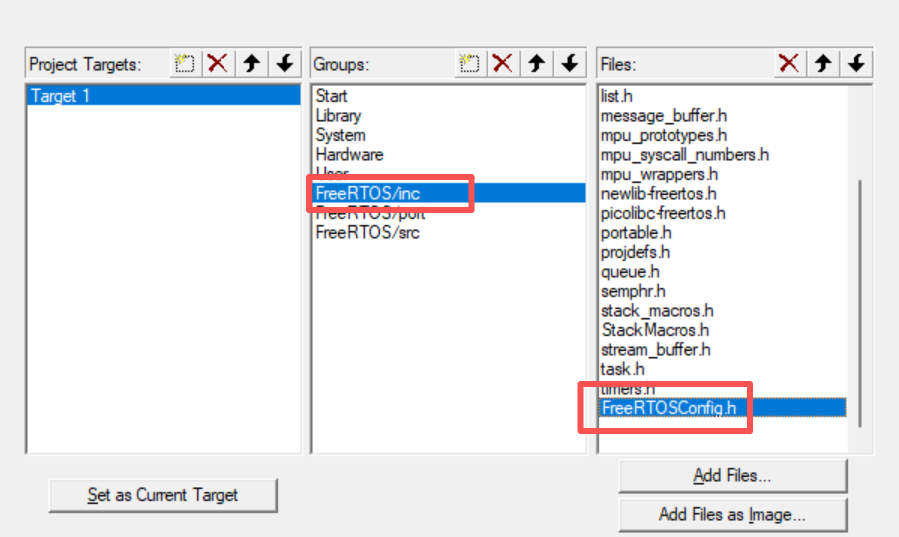
最后,在inc里加入FreeRTOS根目录的config文件:
NOTE
插入完以后,可以将该配置文件挪到最前面,以方便修改时快速打开 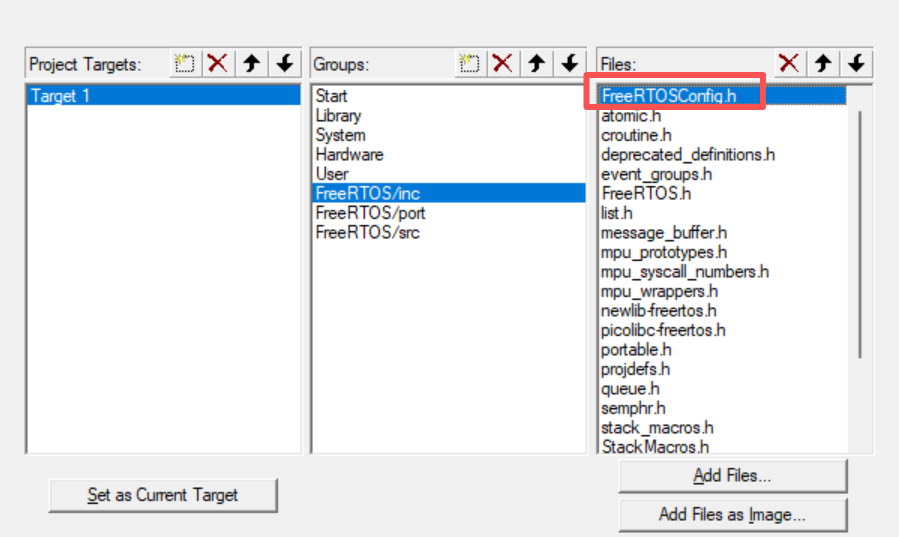
下面,点击魔术棒,将引用目录添加到工程当中,如下图所示: 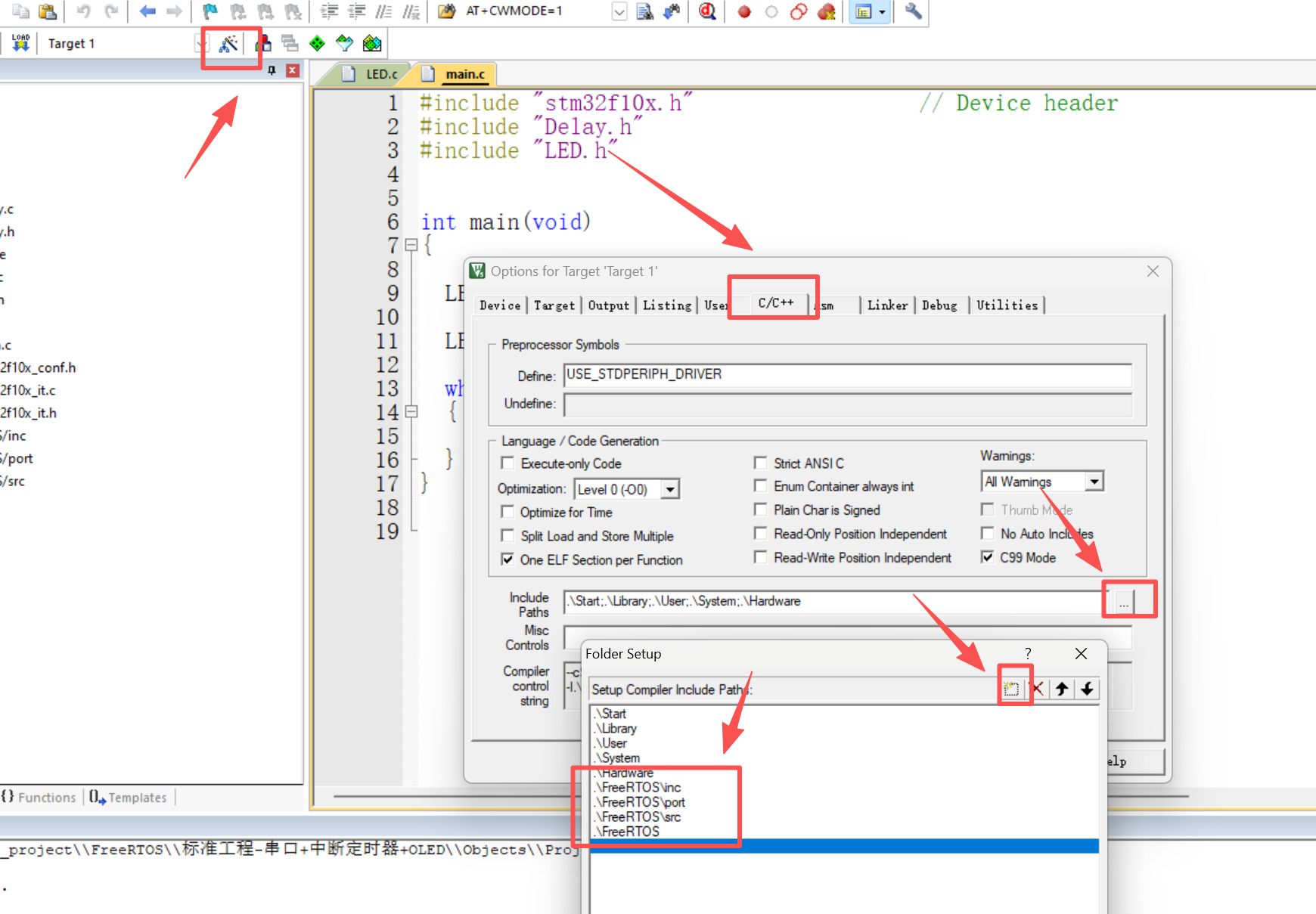
完成以后,点击编译,正常情况的话0错误0警告: 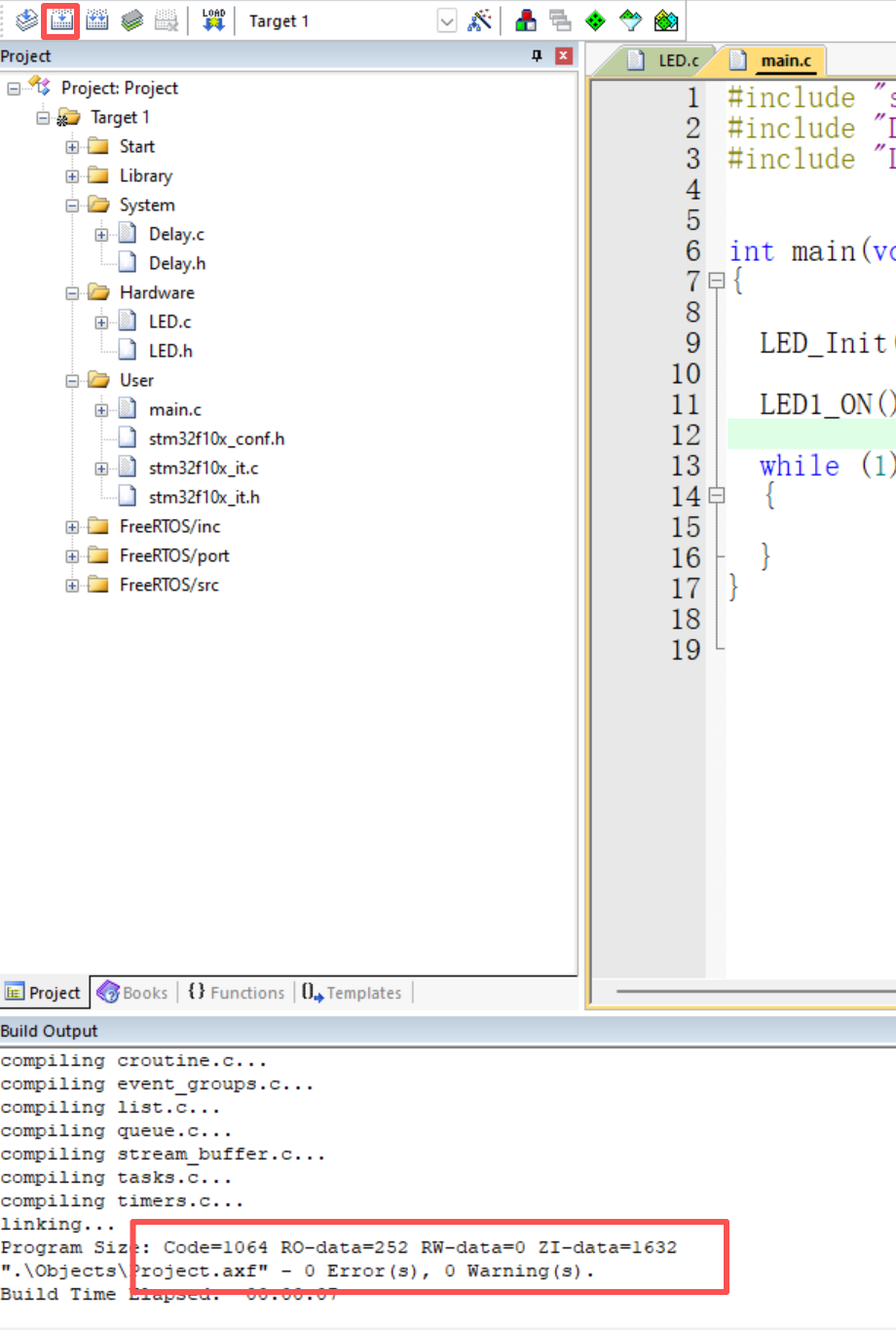
3.修改配置
NOTE
为什么需要修改配置?
到上一步为止,FreeRTOS 的源码已经加入工程并且能编译通过了。但这不代表它能正常运行——FreeRTOS 内核要工作,必须"接管"三个关键的系统中断。这一步就是告诉编译器:这三个中断不再由标准库的默认函数处理,改由 FreeRTOS 来处理。
下面,我们在config文件中添加中断定义: 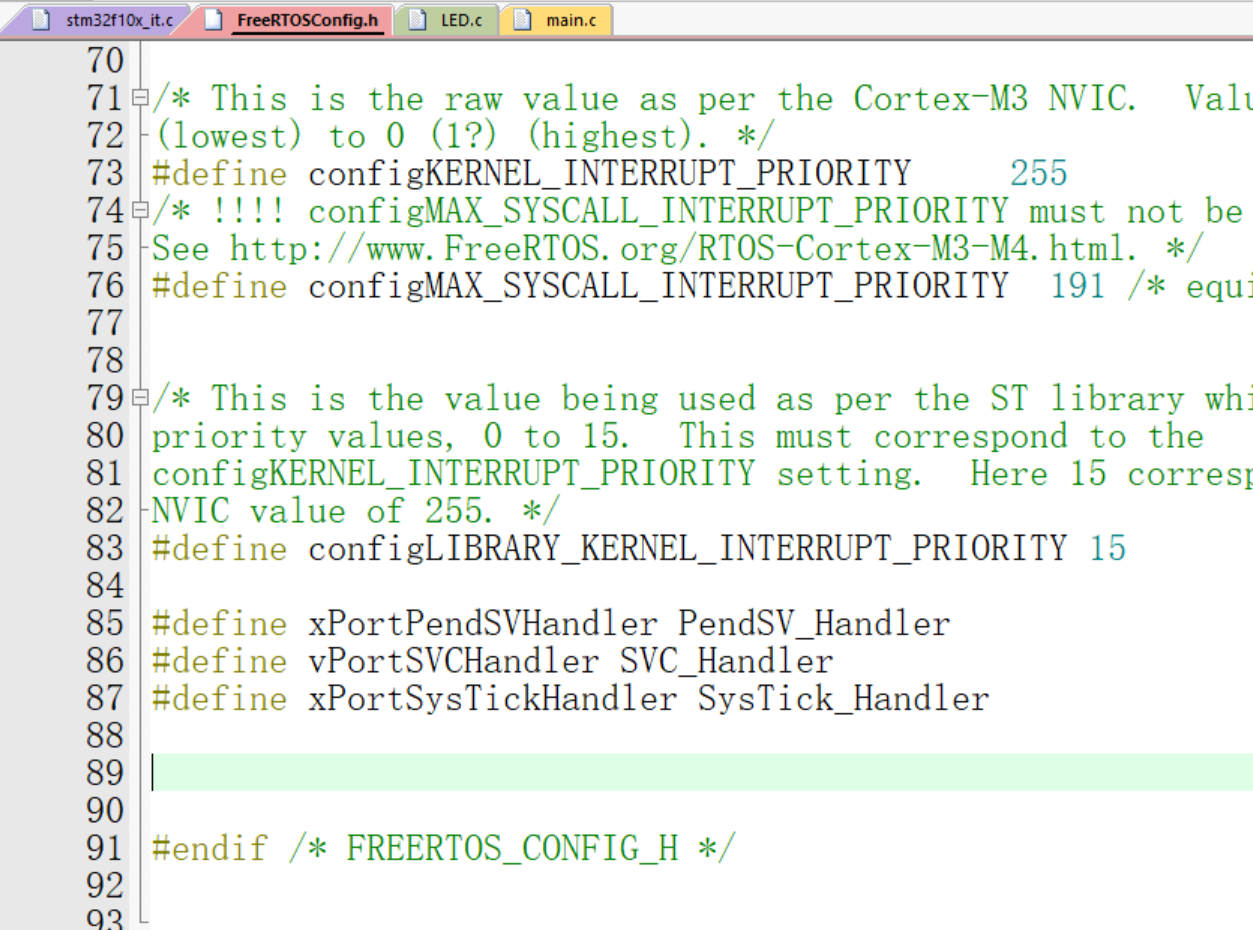
#define xPortPendSVHandler PendSV_Handler
#define vPortSVCHandler SVC_Handler
#define xPortSysTickHandler SysTick_HandlerNOTE
这三个中断分别干什么?
我们添加的三行宏是这样的:
#define xPortPendSVHandler PendSV_Handler
#define vPortSVCHandler SVC_Handler
#define xPortSysTickHandler SysTick_Handler等号左边是 FreeRTOS 内部的函数名,右边是 STM32 标准库启动文件(startup_stm32f10x_hd.s)中定义的中断入口名。这三行 #define 的作用就是把 FreeRTOS 的函数"映射"到 STM32 的中断向量表上,让硬件触发中断时直接跳进 FreeRTOS 的代码。
这三个中断在 FreeRTOS 中各自承担着不可替代的角色:
SysTick_Handler — 系统心跳
SysTick 是 Cortex-M3 内核自带的定时器,FreeRTOS 把它配置成每 1ms 中断一次(由 configTICK_RATE_HZ = 1000 决定)。每次中断时,FreeRTOS 会做两件事:一是把内部的 Tick 计数器加 1(这是所有延时和超时的时间基准),二是检查有没有任务因为延时到期需要被唤醒。可以说 SysTick 就是 FreeRTOS 的"心跳",没有它内核就丧失了时间感知能力。
PendSV_Handler — 任务切换的执行者
当调度器决定要从任务 A 切换到任务 B 时,实际的上下文切换(保存 A 的寄存器、恢复 B 的寄存器)就是在 PendSV 中断里完成的。为什么不直接在 SysTick 里切换?因为 SysTick 中断可能会打断其他更重要的中断,如果在 SysTick 里做耗时的上下文切换操作,会影响系统的实时性。PendSV 被设置为最低优先级的中断,它会等所有其他中断都处理完之后才执行,这样就不会干扰其他中断的响应。
SVC_Handler — 启动第一个任务
SVC(Supervisor Call)是一条 ARM 指令触发的异常。FreeRTOS 只在一个地方用到它:当你调用 vTaskStartScheduler() 启动调度器时,内核通过 SVC 指令切换到第一个任务开始运行。之后的任务切换全部由 PendSV 完成,SVC 就不再使用了。你可以把它理解为"发令枪"——只响一次,但没有它比赛就开始不了。
三者的协作关系可以概括为:
vTaskStartScheduler()
│
▼
SVC 中断 ──→ 启动第一个任务
│
▼
任务正常运行中...
│
┌─────────────┤
▼ │
SysTick 中断 │
(每1ms触发) │
│ │
├─ Tick计数+1 │
├─ 检查延时到期 │
└─ 需要切换任务?──┤
│ 是 │
▼ │
触发 PendSV ─────┤
(等中断空闲时 │
执行上下文切换) │
│ │
▼ │
切换到新任务 ─────┘定义完成之后,我们还需要去原本标准库中定义的文件中将其关掉(注释掉) 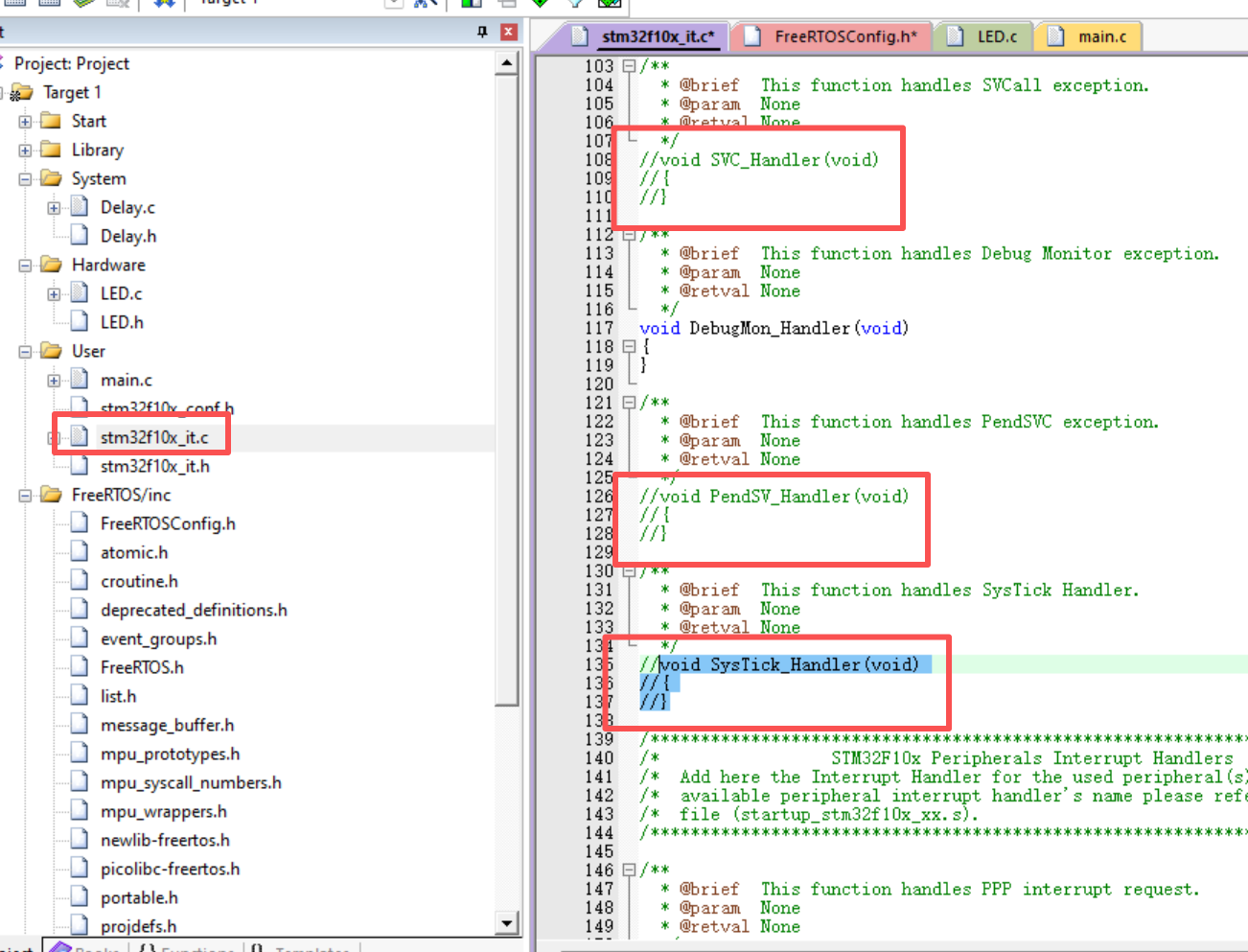
NOTE
为什么要注释掉 stm32f10x_it.c 里的原有定义?
stm32f10x_it.c 是 STM32 标准库的中断处理文件,里面默认提供了 SVC_Handler、PendSV_Handler、SysTick_Handler 这三个函数的空实现(函数体是空的,什么都不做)。
而我们刚才在 FreeRTOSConfig.h 中通过 #define 把 FreeRTOS 的函数重命名成了这三个名字。这意味着现在有两个地方都定义了同名函数——标准库定义了一个空的,FreeRTOS 定义了一个有实际功能的。链接器遇到两个同名函数就会报错:Symbol xxx multiply defined。
解决方法很简单:把 stm32f10x_it.c 里那三个空函数注释掉,让 FreeRTOS 的版本成为唯一的定义。
需要注意的是:stm32f10x_it.c 里的其他中断函数(比如 DebugMon_Handler)不要动,它们跟 FreeRTOS 没有冲突。
修改完成之后,再次编译,正常情况下是0错误0警告: 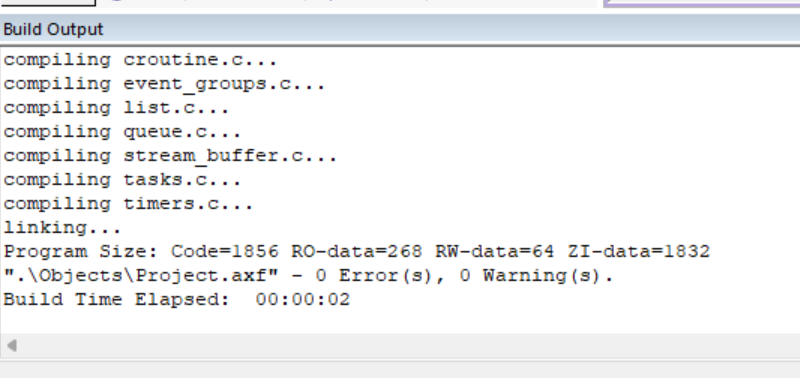
至此,FreeRTOS操作系统移植完成。
4.测试验证
NOTE
用一个最简单的任务来验证移植是否成功
移植完成后,我们需要写一段测试代码来确认 FreeRTOS 确实在正常工作。验证的思路很简单:创建一个任务,让它每隔 500ms 翻转一次 LED。如果 LED 在闪烁,说明任务调度器在正常运行、SysTick 在正常计时、上下文切换没有问题——整个移植就是成功的。
这里,我们编写一个测试的代码来进行功能验证:
#include "stm32f10x.h" // Device header
#include "Delay.h"
#include "LED.h"
#include "FreeRTOS.h" //导入FreeRTOS内核头文件
#include "Task.h" //导入Task头文件
TaskHandle_t myTaskHandler; //创建一个Task任务句柄
//任务函数
void myTask(void *arg)
{
while(1)
{
LED1_Turn();
vTaskDelay(500);
}
}
int main(void)
{
LED_Init();
// LED1_ON();
xTaskCreate(myTask,"myTask",128,NULL,2,&myTaskHandler);
vTaskStartScheduler();
while (1)
{
}
}NOTE
测试代码逐行解读
下面拆解一下这段代码里跟 FreeRTOS 相关的部分:
#include "FreeRTOS.h"
#include "Task.h"FreeRTOS.h 是内核的总头文件,任何用到 FreeRTOS 的地方都必须包含它,而且必须放在其他 FreeRTOS 头文件之前。Task.h 提供了任务相关的 API(xTaskCreate、vTaskDelay 等)。
TaskHandle_t myTaskHandler;任务句柄,可以理解为这个任务的"身份证号"。创建任务后,FreeRTOS 会把任务的控制信息填到这个句柄里。以后如果你想删除、挂起或查询这个任务的状态,就需要通过这个句柄来操作。如果你创建完任务之后不需要再操控它,这个参数也可以传 NULL。
void myTask(void *arg)
{
while(1)
{
LED1_Turn();
vTaskDelay(500);
}
}这是任务函数。每个 FreeRTOS 任务都必须是一个永远不会 return 的函数(里面有一个死循环),参数固定为 void *arg。
这里重点说一下 vTaskDelay(500) 和裸机中的 Delay_ms(500) 的区别,这是理解 RTOS 最关键的地方之一:
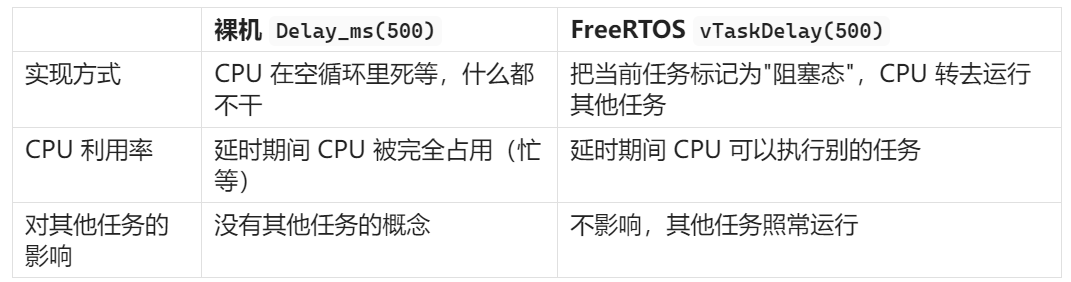
换句话说,vTaskDelay 不是"让 CPU 等 500ms",而是"这个任务先休息 500ms,CPU 你去忙别的"。500ms 后 SysTick 中断发现这个任务的延时到期了,就把它重新标记为"就绪态",调度器会在合适的时机让它继续运行。
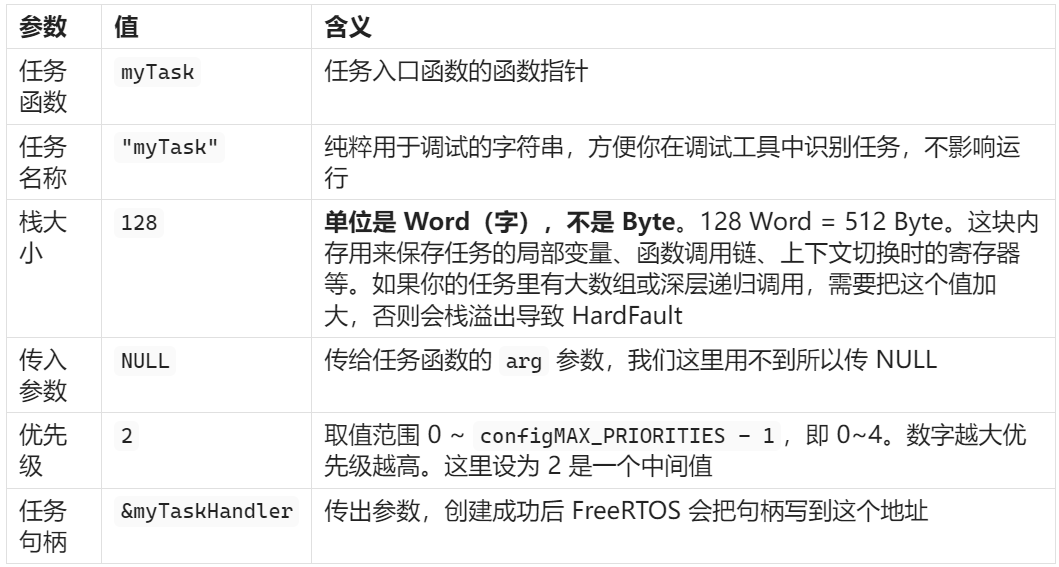
xTaskCreate(myTask, "myTask", 128, NULL, 2, &myTaskHandler);创建任务的 API,6 个参数依次是:
vTaskStartScheduler();启动调度器。调用这个函数后,FreeRTOS 会:
- 自动创建一个空闲任务(Idle Task),优先级为 0(最低)
- 配置 SysTick 定时器,开始产生系统节拍中断
- 通过 SVC 中断切换到当前最高优先级的就绪任务开始运行
这个函数正常情况下永远不会返回。 因为一旦调度器启动,CPU 的控制权就交给了 FreeRTOS,它会在各个任务之间不断切换。后面的 while(1) 理论上永远不会执行到——它存在的意义是"以防万一"(比如堆内存不足导致调度器启动失败)。
整个程序的执行流程如下:
main()
│
├─ LED_Init() ← 硬件初始化(还是裸机环境)
│
├─ xTaskCreate(myTask, ...) ← 创建任务(只是登记,还没运行)
│
├─ vTaskStartScheduler() ← 启动调度器,从此进入 RTOS 世界
│ │
│ ├─ 创建 Idle Task
│ ├─ 配置 SysTick
│ └─ SVC 中断 → 跳转到 myTask 开始运行
│ │
│ ├─ LED1_Turn()
│ ├─ vTaskDelay(500) → 任务阻塞,切换到 Idle Task
│ │ (500ms 后被 SysTick 唤醒)
│ ├─ LED1_Turn()
│ ├─ vTaskDelay(500) → 再次阻塞...
│ └─ ... 如此循环
│
└─ while(1) { } ← 永远不会执行到这里1.硬件直接烧录验证
编译烧录验证,如果观察到小灯每隔500毫秒闪烁一次,则说明FreeRTOS已经成功跑通。 
2.软件仿真验证
相关配置如下: 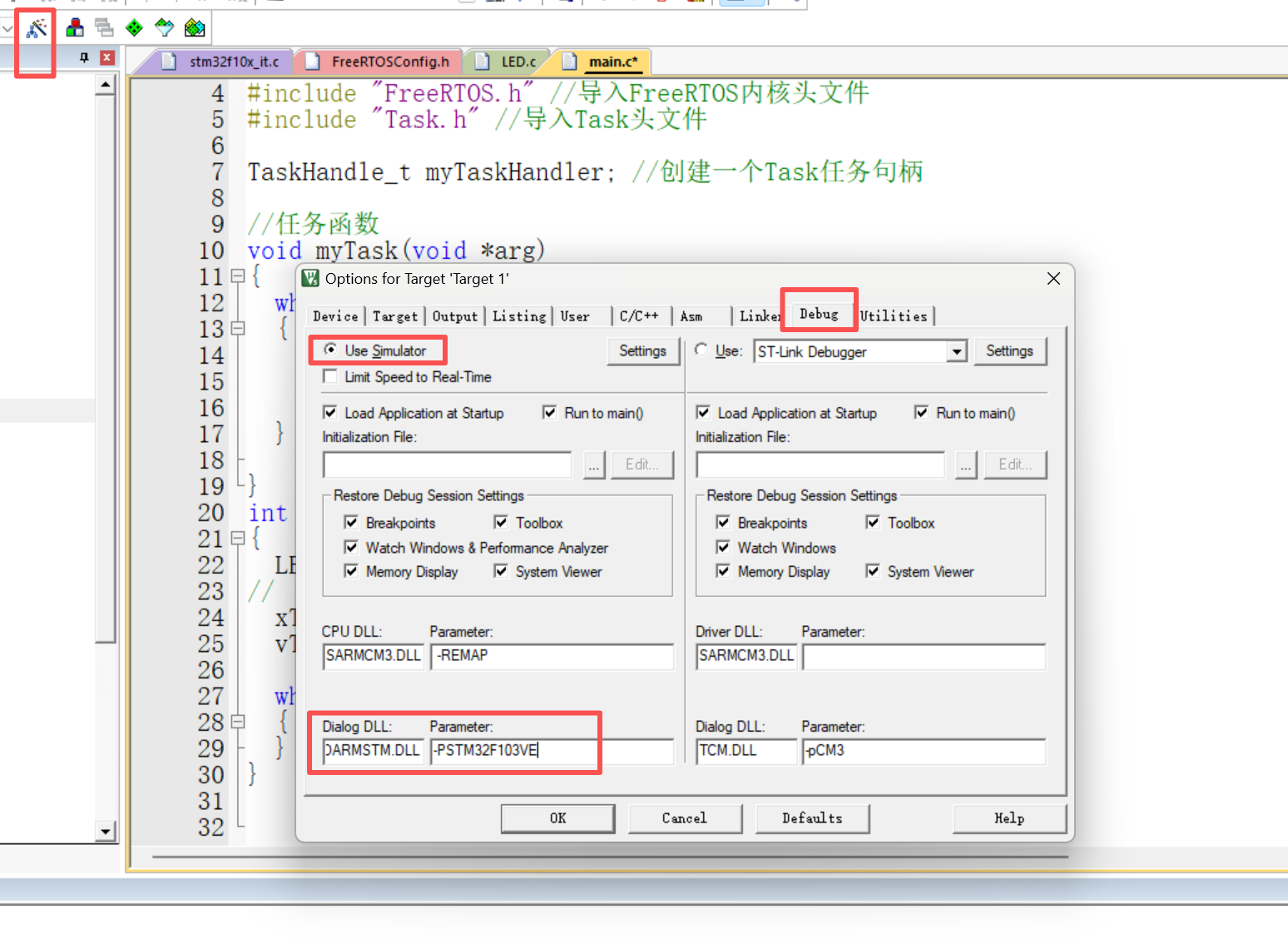
然后点击仿真 
打开逻辑分析仪窗口: 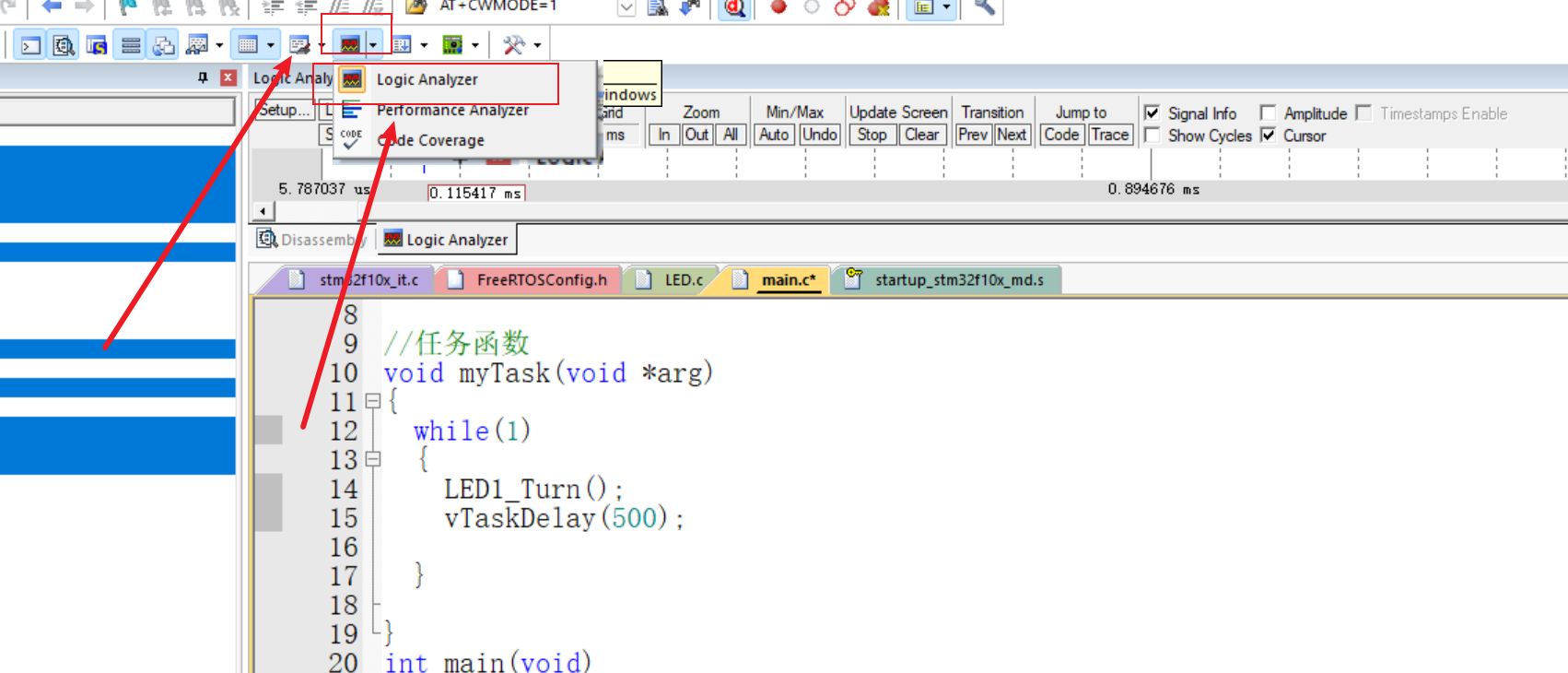 添加PB1作为逻辑信号
添加PB1作为逻辑信号 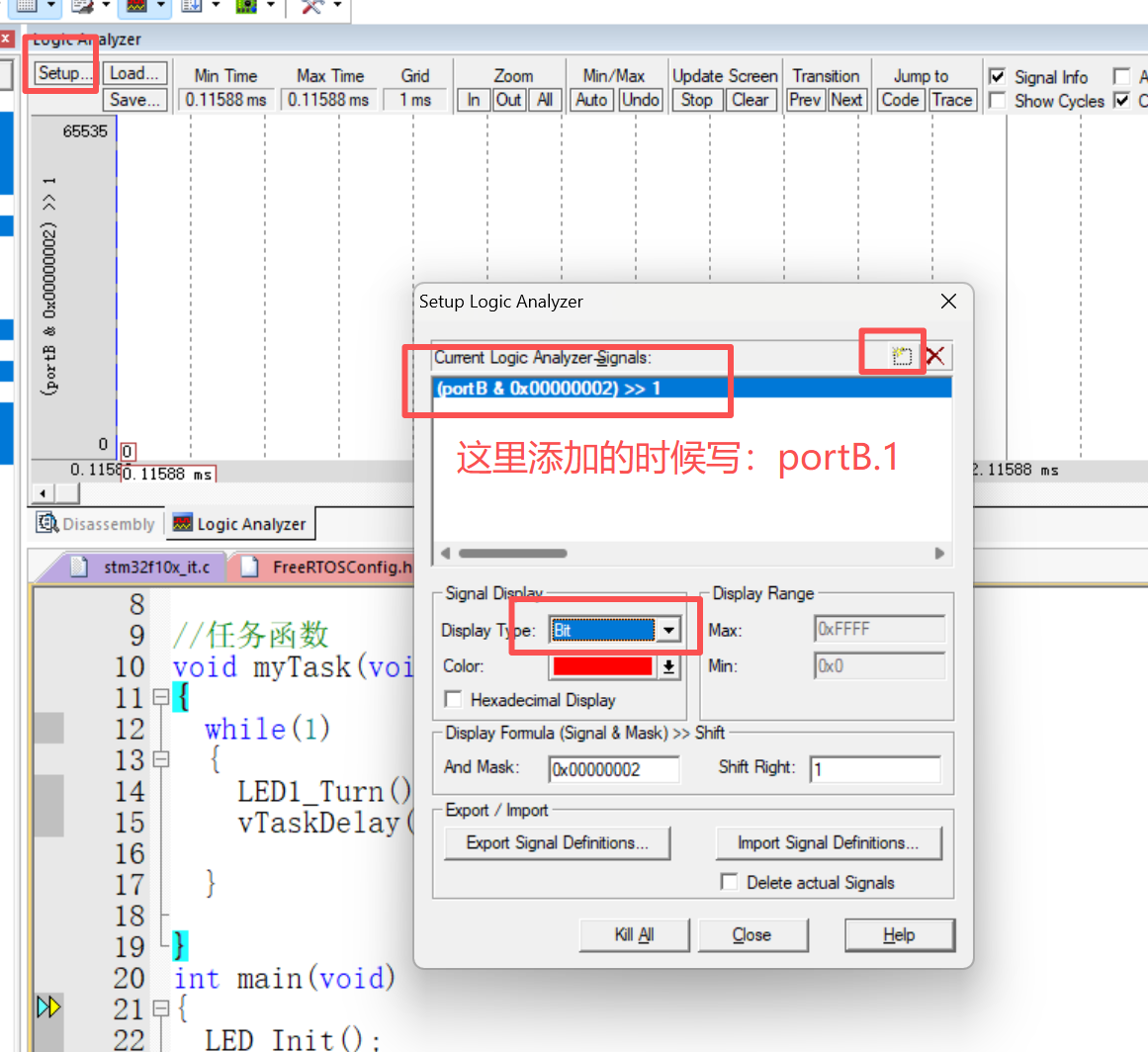
完成之后,点击Close
随后,点击全速运行: 
这样,就可以在逻辑分析仪上看到电平信号了: 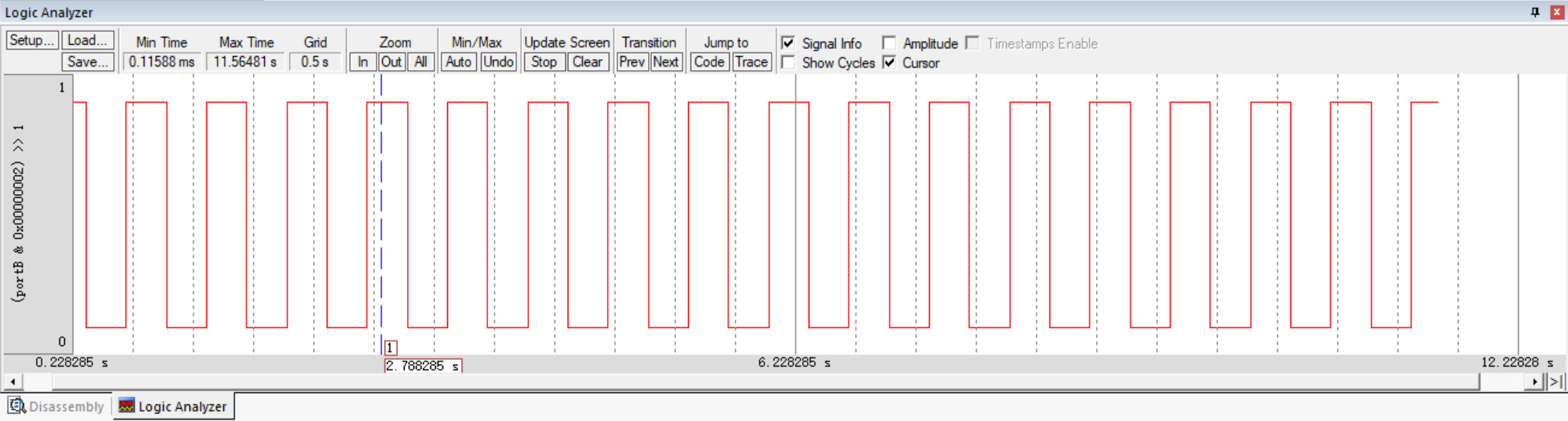
可以看到电平每隔500ms跳变一次,说明FreeRTOS任务运行正常,移植没问题。