3.第二阶段 LIO-SAM 适配
LIO-SAM环境搭建
GTSAM 编译
cd ~
mkdir -p carplaning/3rdparty
git clone https://github.com/borglab/gtsam.git
cd gtsam
mkdir build && cd build
cmake -DGTSAM_BUILD_WITH_MARCH_NATIVE=OFF ..
make -j$(nproc)
sudo make installLIO-SAM 编译
cd ~/carplaning/liosam_ws/src
sudo apt-get install ros-humble-perception-pcl \
ros-humble-pcl-msgs \
ros-humble-vision-opencv \
ros-humble-xacro \
ros-humble-geographic-msgs
git clone -b ros2 https://github.com/TixiaoShan/LIO-SAM.git
#新版本的GTSAM 全面转向了 C++ 标准库的 std::shared_ptr,所以需要修改一下源码进行适配
cd ~/carplaning/liosam_ws/src/LIO-SAM/src/ sed -i 's/boost::shared_ptr/std::shared_ptr/g' imuPreintegration.cpp
#编译lio-sam
colcon build --symlink-install --packages-select lio_sam
#这里遇到编译报错就询问ai进行解决,直到编译成功LIO-SAM 测试
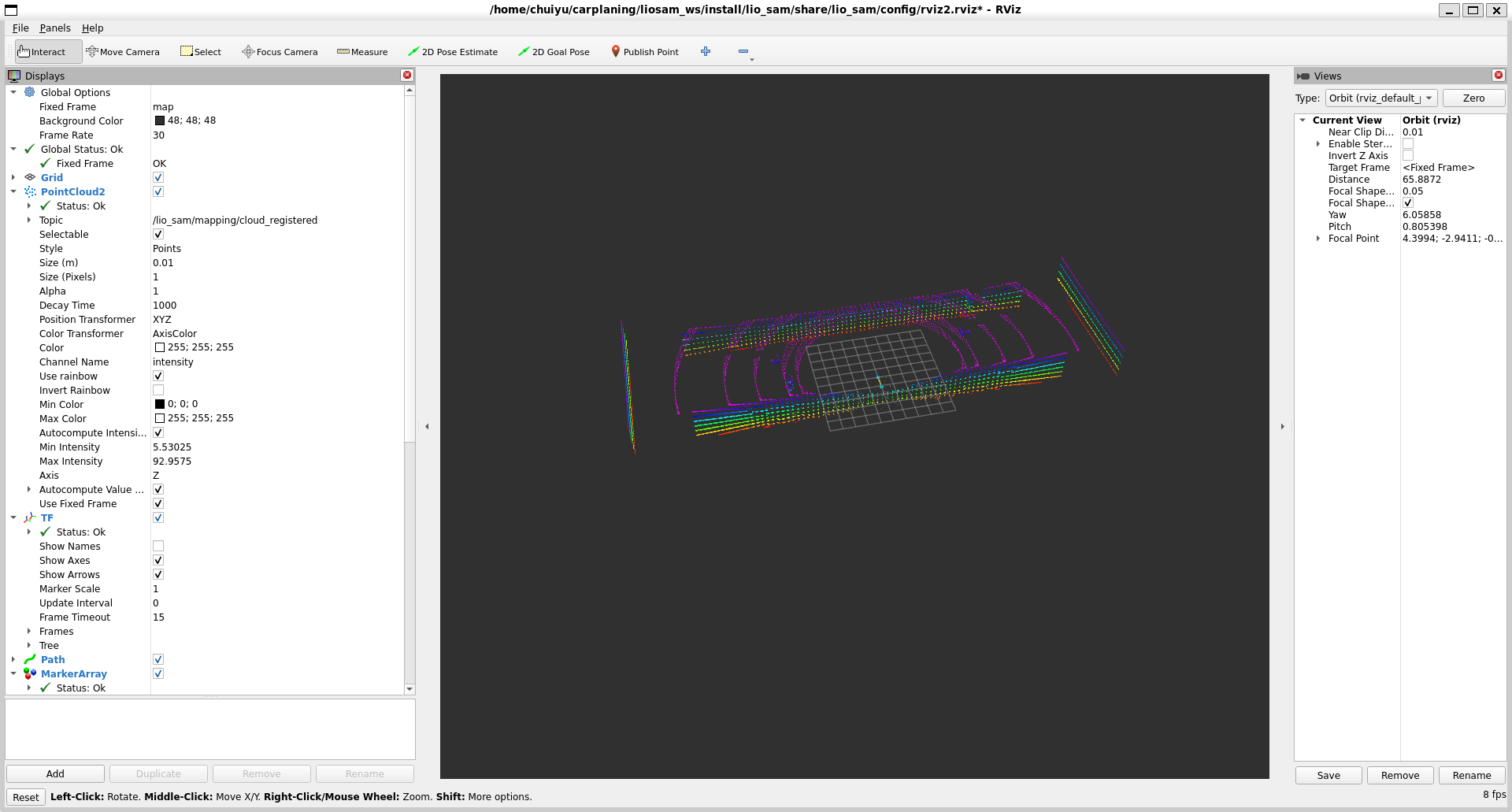
#运行一键脚本,界面如下图
ros2 launch lio_sam run.launch.py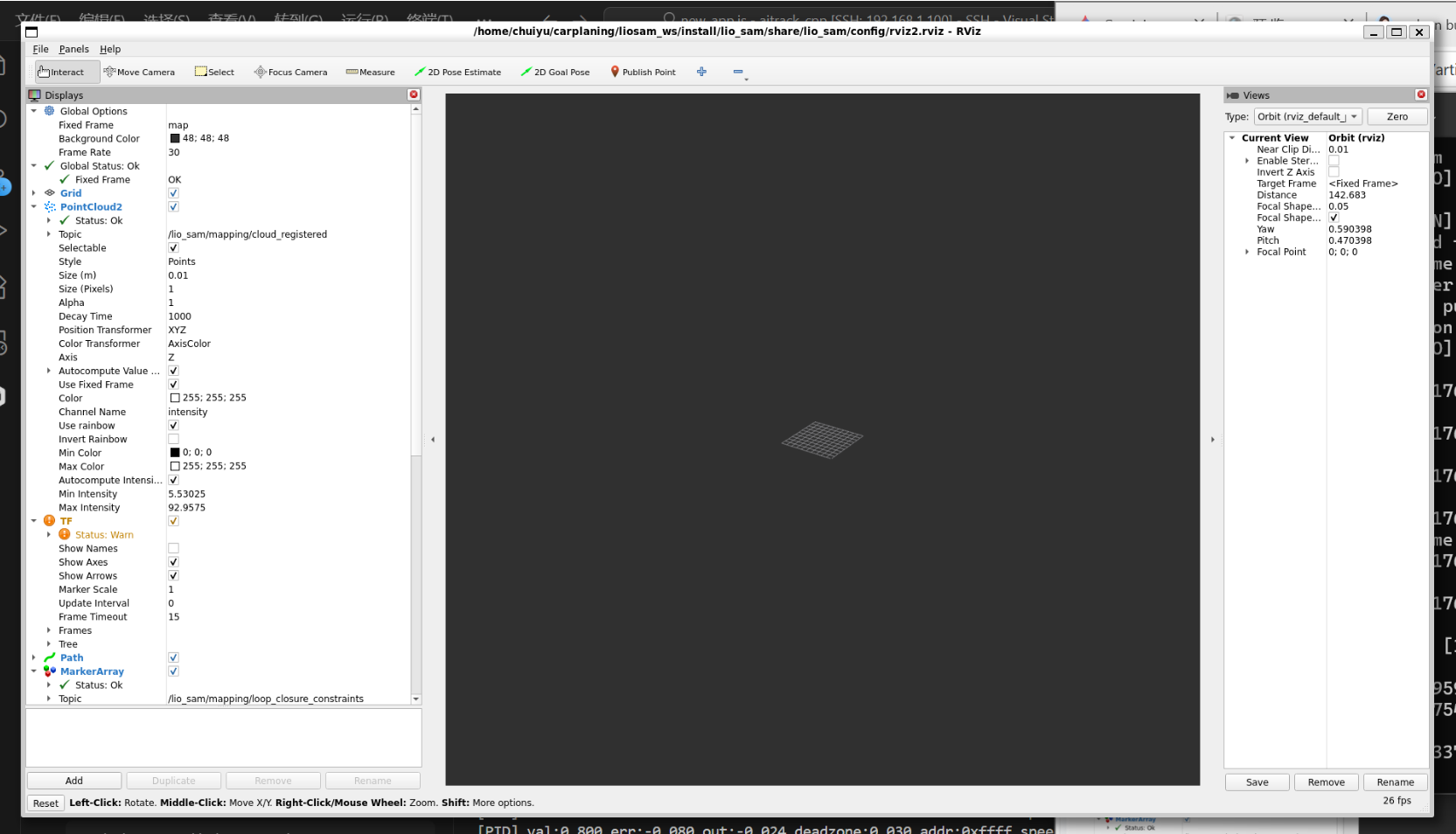
LIO-SAM 仿真测试
(1)下载数据集 github的README中有下载链接,下载walking dataset数据集 (2)转换格式 下载的数据集是ROS1的.bag格式,需要进行转换,执行如下命令 rosbags-convert --src [ROS1格式数据集文件] --dst [ROS2格式数据集路径]
因为不同的数据集的话题可能会与默认的topic不同,这里根据数据集的话题进行修改。 (1)修改params.yaml文件 ```yaml /**: ros__parameters:
# # Topics
# pointCloudTopic: "/points_raw" # Point cloud data
# imuTopic: "/imu_correct" # IMU data
# odomTopic: "/gx5/nav/odom" # IMU pre-preintegration odometry, same frequency as IMU
# gpsTopic: "/gx5/gps/fix" # GPS odometry topic from navsat, see module_navsat.launch file
# # Frames
# lidarFrame: "velodyne"
# baselinkFrame: "base_link"
# odometryFrame: "wgs84_odom_link"
# mapFrame: "map"
# Topics
pointCloudTopic: "points_raw" # Point cloud data
imuTopic: "imu_raw" # IMU data
odomTopic: "odometry/imu" # IMU pre-preintegration odometry, same frequency as IMU
gpsTopic: "odometry/gpsz" # GPS odometry topic from navsat, see module_navsat.launch file
# Frames
lidarFrame: ""velodyne"
baselinkFrame: "base_link"
odometryFrame: "odom"
mapFrame: "map"
# GPS Settings
useImuHeadingInitialization: false # if using GPS data, set to "true"
useGpsElevation: false # if GPS elevation is bad, set to "false"
gpsCovThreshold: 2.0 # m^2, threshold for using GPS data
poseCovThreshold: 25.0 # m^2, threshold for using GPS data
# Export settings
savePCD: true # https://github.com/TixiaoShan/LIO-SAM/issues/3
savePCDDirectory: "/workspace/CAR/LIO-SAM_ws/pcd" # in your home folder, starts and ends with "/". Warning: the code deletes "LOAM" folder then recreates it. See "mapOptimization" for implementation
# Sensor Settings
sensor: velodyne # lidar sensor type, either 'velodyne', 'ouster' or 'livox'
N_SCAN: 16 # number of lidar channels (i.e., Velodyne/Ouster: 16, 32, 64, 128, Livox Horizon: 6)
Horizon_SCAN: 1800 # lidar horizontal resolution (Velodyne:1800, Ouster:512,1024,2048, Livox Horizon: 4000)
downsampleRate: 1 # default: 1. Downsample your data if too many
# points. i.e., 16 = 64 / 4, 16 = 16 / 1
lidarMinRange: 1.0 # default: 1.0, minimum lidar range to be used
lidarMaxRange: 1000.0 # default: 1000.0, maximum lidar range to be used
# IMU Settings
imuAccNoise: 3.9939570888238808e-03
imuGyrNoise: 1.5636343949698187e-03
imuAccBiasN: 6.4356659353532566e-05
imuGyrBiasN: 3.5640318696367613e-05
imuGravity: 9.80511
imuRPYWeight: 0.01
extrinsicTrans: [ 0.0, 0.0, 0.0 ]
extrinsicRot: [-1.0, 0.0, 0.0,
0.0, 1.0, 0.0,
0.0, 0.0, -1.0 ]
# extrinsicRPY: [ 0.0, 1.0, 0.0,
# -1.0, 0.0, 0.0,
# 0.0, 0.0, 1.0 ]
extrinsicRPY: [ 0.0, -1.0, 0.0,
1.0, 0.0, 0.0,
0.0, 0.0, 1.0 ]
# LOAM feature threshold
edgeThreshold: 1.0
surfThreshold: 0.1
edgeFeatureMinValidNum: 10
surfFeatureMinValidNum: 100
# voxel filter paprams
odometrySurfLeafSize: 0.4 # default: 0.4 - outdoor, 0.2 - indoor
mappingCornerLeafSize: 0.2 # default: 0.2 - outdoor, 0.1 - indoor
mappingSurfLeafSize: 0.4 # default: 0.4 - outdoor, 0.2 - indoor
# robot motion constraint (in case you are using a 2D robot)
z_tollerance: 1000.0 # meters
rotation_tollerance: 1000.0 # radians
# CPU Params
numberOfCores: 4 # number of cores for mapping optimization
mappingProcessInterval: 0.15 # seconds, regulate mapping frequency
# Surrounding map
surroundingkeyframeAddingDistThreshold: 1.0 # meters, regulate keyframe adding threshold
surroundingkeyframeAddingAngleThreshold: 0.2 # radians, regulate keyframe adding threshold
surroundingKeyframeDensity: 2.0 # meters, downsample surrounding keyframe poses
surroundingKeyframeSearchRadius: 50.0 # meters, within n meters scan-to-map optimization
# (when loop closure disabled)
# Loop closure
loopClosureEnableFlag: true
loopClosureFrequency: 1.0 # Hz, regulate loop closure constraint add frequency
surroundingKeyframeSize: 50 # submap size (when loop closure enabled)
historyKeyframeSearchRadius: 15.0 # meters, key frame that is within n meters from
# current pose will be considerd for loop closure
historyKeyframeSearchTimeDiff: 30.0 # seconds, key frame that is n seconds older will be
# considered for loop closure
historyKeyframeSearchNum: 25 # number of hostory key frames will be fused into a
# submap for loop closure
historyKeyframeFitnessScore: 0.3 # icp threshold, the smaller the better alignment
# Visualization
globalMapVisualizationSearchRadius: 1000.0 # meters, global map visualization radius
globalMapVisualizationPoseDensity: 10.0 # meters, global map visualization keyframe density
globalMapVisualizationLeafSize: 1.0 # meters, global map visualization cloud density
```
source install/setup.bash
ros2 launch lio_sam run.launch.pyros2 bag play [三中准备的ROS2的数据集文件夹路径]
配置 IMU 外参(extrinsicRot / extrinsicTrans)
这是让 LIO-SAM 跑通你自定义仿真车的关键。你的 URDF 里 IMU 挂在 base_link 原点(origin xyz="0 0 0"),LiDAR 挂在 xyz="1.2 0 1.4" 的位置。这个相对关系需要准确填进 params.yaml,否则点云拼接会漂移。
具体要做的事是:
- 确认外参数值 —— 从你的 URDF 直接读出来,LiDAR 相对 IMU 的平移是
[1.2, 0, 1.4],旋转是单位阵(两者姿态一致,都没有旋转偏移)。 - 修改 params.yaml —— 把
extrinsicTrans和extrinsicRot填对。 - 对齐话题名 —— 你的仿真输出是
/points_raw和/imu_raw,需要确认params.yaml里的话题配置与之匹配。 - 跑一圈验证 —— 开车绕场地走一圈,在 Rviz 里看点云地图有没有重影或漂移,以此判断外参是否正确。
code ~/carplaning/liosam_ws/src/LIO-SAM/config/params.yaml第一处:话题名对齐
你的仿真输出话题是 /points_raw 和 /imu_raw,所以:
yaml
pointCloudTopic: "points_raw"
imuTopic: "imu_raw"
gpsTopic: "gps/fix"第二处:雷达参数对齐
你在 URDF 里配的是 32线、水平1800采样:
yaml
sensor: velodyne
N_SCAN: 32
Horizon_SCAN: 1800第三处:外参(最关键)
从你的 URDF 直接读出来:
- IMU 在
base_link原点:xyz="0 0 0" - LiDAR 在:
xyz="1.2 0 1.4",没有旋转偏移
所以 LiDAR 相对于 IMU 的平移就是 [1.2, 0.0, 1.4],旋转是单位矩阵:
yaml
extrinsicTrans: [1.2, 0.0, 1.4]
extrinsicRot: [1.0, 0.0, 0.0,
0.0, 1.0, 0.0,
0.0, 0.0, 1.0]
extrinsicRPY: [1.0, 0.0, 0.0,
0.0, 1.0, 0.0,
0.0, 0.0, 1.0]第四处:坐标帧名
yaml
lidarFrame: "lidar_link"
baselinkFrame: "base_link"
odometryFrame: "odom"
mapFrame: "map"第五处:开启 GPS
yaml
useImuHeadingInitialization: true
useGpsElevation: false
gpsCovThreshold: 2.0
poseCovThreshold: 25.0修改完之后,先同时启动仿真和 LIO-SAM,然后用键盘控制车慢慢开一圈,在 Rviz 里观察 /lio_sam/mapping/cloud_registered 这个话题,点云地图应该是清晰无重影的。如果出现漂移,基本就是外参没对上,到时候再排查。
修改完后的完整params.yaml:
/**:
ros__parameters:
use_sim_time: true
# Topics
pointCloudTopic: "/points" # Point cloud data
imuTopic: "/imu/data" # IMU data
odomTopic: "odometry/imu" # IMU pre-preintegration odometry, same frequency as IMU
gpsTopic: "odometry/gpsz" # GPS odometry topic from navsat, see module_navsat.launch file
# Frames
lidarFrame: "lidar_link"
baselinkFrame: "base_link"
odometryFrame: "odom"
mapFrame: "map"
# GPS Settings
useImuHeadingInitialization: false # if using GPS data, set to "true"
useGpsElevation: false # if GPS elevation is bad, set to "false"
gpsCovThreshold: 2.0 # m^2, threshold for using GPS data
poseCovThreshold: 25.0 # m^2, threshold for using GPS data
# Export settings
savePCD: true # https://github.com/TixiaoShan/LIO-SAM/issues/3
savePCDDirectory: "/LIO-SAM/src/maps/" # in your home folder, starts and ends with "/". Warning: the code deletes "LOAM" folder then recreates it. See "mapOptimization" for implementation
# Sensor Settings
sensor: velodyne # lidar sensor type, either 'velodyne', 'ouster' or 'livox'
N_SCAN: 64 # number of lidar channels (i.e., Velodyne/Ouster: 16, 32, 64, 128, Livox Horizon: 6)
Horizon_SCAN: 1800 # lidar horizontal resolution (Velodyne:1800, Ouster:512,1024,2048, Livox Horizon: 4000)
downsampleRate: 1 # default: 1. Downsample your data if too many
# points. i.e., 16 = 64 / 4, 16 = 16 / 1
lidarMinRange: 1.0 # default: 1.0, minimum lidar range to be used
lidarMaxRange: 1000.0 # default: 1000.0, maximum lidar range to be used
# IMU Settings
imuAccNoise: 3.9939570888238808e-03
imuGyrNoise: 1.5636343949698187e-03
imuAccBiasN: 6.4356659353532566e-05
imuGyrBiasN: 3.5640318696367613e-05
imuGravity: 9.80511
imuRPYWeight: 0.01
extrinsicTrans: [ 0.0, 0.0, 0.0 ]
extrinsicRot: [ 1.0, 0.0, 0.0,
0.0, -1.0, 0.0,
0.0, 0.0, -1.0 ]
extrinsicRPY: [ 1.0, 0.0, 0.0,
0.0, -1.0, 0.0,
0.0, 0.0, -1.0 ]
# LOAM feature threshold
edgeThreshold: 1.0
surfThreshold: 0.1
edgeFeatureMinValidNum: 10
surfFeatureMinValidNum: 100
# voxel filter paprams
odometrySurfLeafSize: 0.4 # default: 0.4 - outdoor, 0.2 - indoor
mappingCornerLeafSize: 0.2 # default: 0.2 - outdoor, 0.1 - indoor
mappingSurfLeafSize: 0.4 # default: 0.4 - outdoor, 0.2 - indoor
# robot motion constraint (in case you are using a 2D robot)
z_tollerance: 1000.0 # meters
rotation_tollerance: 1000.0 # radians
# CPU Params
numberOfCores: 4 # number of cores for mapping optimization
mappingProcessInterval: 0.15 # seconds, regulate mapping frequency
# Surrounding map
surroundingkeyframeAddingDistThreshold: 1.0 # meters, regulate keyframe adding threshold
surroundingkeyframeAddingAngleThreshold: 0.2 # radians, regulate keyframe adding threshold
surroundingKeyframeDensity: 2.0 # meters, downsample surrounding keyframe poses
surroundingKeyframeSearchRadius: 50.0 # meters, within n meters scan-to-map optimization
# (when loop closure disabled)
# Loop closure
loopClosureEnableFlag: true
loopClosureFrequency: 1.0 # Hz, regulate loop closure constraint add frequency
surroundingKeyframeSize: 50 # submap size (when loop closure enabled)
historyKeyframeSearchRadius: 15.0 # meters, key frame that is within n meters from
# current pose will be considerd for loop closure
historyKeyframeSearchTimeDiff: 30.0 # seconds, key frame that is n seconds older will be
# considered for loop closure
historyKeyframeSearchNum: 25 # number of hostory key frames will be fused into a
# submap for loop closure
historyKeyframeFitnessScore: 0.3 # icp threshold, the smaller the better alignment
# Visualization
globalMapVisualizationSearchRadius: 1000.0 # meters, global map visualization radius
globalMapVisualizationPoseDensity: 10.0 # meters, global map visualization keyframe density
globalMapVisualizationLeafSize: 1.0 # meters, global map visualization cloud density改动了以下几处,用注释标明了原因:
pointCloudTopic→points_raw,对应 URDF 里雷达插件的 remappingimuTopic→imu_raw,同上gpsTopic→gps/fix,对应 GPS 插件的 remappinguseImuHeadingInitialization→true,因为开了 GPSN_SCAN→32,对应 URDF 里<samples>32</samples>extrinsicTrans→[1.2, 0.0, 1.4],从 URDF 直接读出extrinsicRot/extrinsicRPY→ 单位矩阵,两个传感器姿态一致无旋转偏移- voxel filter 的三个参数调小了,你的场景是封闭室内,精细一点效果更好
同时,实测IMU没有数据,在这里修改一下xacro:
code /home/chuiyu/carplaning/liosam_ws/src/audibot/audibot_description/urdf/audibot.urdf.xacro
<?xml version="1.0"?>
<robot name="audibot" xmlns:xacro="http://www.ros.org/wiki/xacro">
<xacro:property name="half_front_track_width" value="0.819" />
<xacro:property name="half_rear_track_width" value="0.8" />
<xacro:property name="half_wheelbase" value="1.326" />
<xacro:property name="wheel_radius" value="0.36" />
<xacro:property name="wheel_thickness" value="0.25" />
<xacro:property name="wheel_mass" value="40.0" />
<xacro:property name="body_mass" value="1620.0" />
<xacro:property name="body_width" value="${2*half_rear_track_width}" />
<xacro:property name="body_depth" value="${2*half_wheelbase + 0.8}" />
<xacro:property name="body_length" value="0.6" />
<xacro:arg name="pub_tf" default="true" />
<xacro:arg name="robot_name" default="" />
<xacro:arg name="blue" default="false" />
<gazebo>
<!-- Simulated vehicle interface -->
<plugin name="audibot_interface_plugin" filename="libaudibot_interface_plugin.so" >
<robot_name>$(arg robot_name)</robot_name>
<pub_tf>$(arg pub_tf)</pub_tf>
<tf_freq>100.0</tf_freq>
<ros>
<namespace>$(arg robot_name)</namespace>
</ros>
</plugin>
<!-- Publish current joint angles -->
<plugin name="joint_state_publisher" filename="libgazebo_ros_joint_state_publisher.so">
<joint_name>steer_fl_joint</joint_name>
<joint_name>steer_fr_joint</joint_name>
<joint_name>wheel_fl_joint</joint_name>
<joint_name>wheel_fr_joint</joint_name>
<joint_name>wheel_rl_joint</joint_name>
<joint_name>wheel_rr_joint</joint_name>
<update_rate>100</update_rate>
<ros>
<namespace>$(arg robot_name)</namespace>
</ros>
</plugin>
</gazebo>
<xacro:macro name="rear_wheel" params="name x y z flip" >
<link name="wheel_${name}" >
<visual>
<origin xyz="0 0 0" rpy="1.57079632679 ${flip * 3.1415926535} 0" />
<geometry>
<mesh filename="file://$(find audibot_description)/meshes/wheel.dae" scale="1 1 1" />
</geometry>
</visual>
<collision>
<geometry>
<cylinder radius="${wheel_radius}" length="${wheel_thickness}" />
</geometry>
</collision>
<inertial>
<origin xyz="0 0 0" rpy="0 0 0"/>
<mass value="${wheel_mass}"/>
<inertia ixx="${wheel_mass/12*(3*wheel_radius*wheel_radius + wheel_thickness*wheel_thickness)}" ixy="0" ixz="0" iyy="${wheel_mass/12*(3*wheel_radius*wheel_radius + wheel_thickness*wheel_thickness)}" iyz="0" izz="${wheel_mass/2 * wheel_radius*wheel_radius}"/>
</inertial>
</link>
<joint name="wheel_${name}_joint" type="continuous" >
<parent link="base_link" />
<child link="wheel_${name}" />
<origin xyz="${x} ${y} ${z}" rpy="-1.57079632679 0 0" />
<axis xyz="0 0 1" />
<limit effort="-1.0" velocity="-1.0" />
</joint>
</xacro:macro>
<xacro:macro name="front_wheel" params="name x y z flip" >
<link name="wheel_${name}" >
<visual>
<origin xyz="0 0 0" rpy="1.57079632679 ${flip * pi} 0" />
<geometry>
<mesh filename="file://$(find audibot_description)/meshes/wheel.dae" scale="1 1 1" />
</geometry>
</visual>
<collision>
<geometry>
<cylinder radius="${wheel_radius}" length="${wheel_thickness}" />
</geometry>
</collision>
<inertial>
<origin xyz="0 0 0" rpy="0 0 0"/>
<mass value="${wheel_mass}"/>
<inertia ixx="${wheel_mass/12*(3*wheel_radius*wheel_radius + wheel_thickness*wheel_thickness)}" ixy="0" ixz="0" iyy="${wheel_mass/12*(3*wheel_radius*wheel_radius + wheel_thickness*wheel_thickness)}" iyz="0" izz="${wheel_mass/2 * wheel_radius*wheel_radius}"/>
</inertial>
</link>
<link name="steer_${name}" >
<inertial>
<origin xyz="-0.013054 -0.0295 0" rpy="0 0 0"/>
<mass value="20.0"/>
<inertia ixx="2" ixy="0" ixz="0" iyy="2" iyz="0" izz="2"/>
</inertial>
</link>
<joint name="steer_${name}_joint" type="revolute" >
<parent link="base_link" />
<child link="steer_${name}" />
<origin xyz="${x} ${y} ${z}" rpy="0 0 0" />
<axis xyz="0 0 1" />
<limit upper="0.6" lower="-0.6" effort="-1.0" velocity="-1.0" />
</joint>
<joint name="wheel_${name}_joint" type="continuous" >
<parent link="steer_${name}" />
<child link="wheel_${name}" />
<origin xyz="0 0 0" rpy="-1.57079632679 0 0" />
<axis xyz="0 0 1" />
<limit effort="-1.0" velocity="-1.0" />
</joint>
</xacro:macro>
<link name="base_footprint">
</link>
<link name="base_link">
<visual>
<origin xyz="0.035 0 0.025" rpy="0 0 0" />
<geometry>
<xacro:if value="$(arg blue)" >
<mesh filename="file://$(find audibot_description)/meshes/blue_body.dae" scale="1 1 1" />
</xacro:if>
<xacro:unless value="$(arg blue)" >
<mesh filename="file://$(find audibot_description)/meshes/orange_body.dae" scale="1 1 1" />
</xacro:unless>
</geometry>
</visual>
<collision>
<origin xyz="0.035 0 0.025" rpy="0 0 0" />
<geometry>
<mesh filename="file://$(find audibot_description)/meshes/body_collision.stl" scale="1 1 1" />
</geometry>
</collision>
<inertial>
<origin xyz="0 0 0" rpy="0 0 0"/>
<mass value="${body_mass}"/>
<inertia ixx="${body_mass/12 * (body_width*body_width + body_length*body_length)}" ixy="0" ixz="0" iyy="${body_mass/12 * (body_length*body_length + body_depth*body_depth)}" iyz="0" izz="${body_mass/12 * (body_width*body_width + body_depth*body_depth)}"/>
</inertial>
</link>
<joint name="base_link_joint" type="fixed">
<origin xyz="${half_wheelbase} 0 ${wheel_radius}" rpy="0 0 0"/>
<parent link="base_footprint"/>
<child link="base_link"/>
</joint>
<xacro:rear_wheel name="rl" x="${-half_wheelbase}" y="${half_rear_track_width}" z="0" flip="1" />
<xacro:rear_wheel name="rr" x="${-half_wheelbase}" y="${-half_rear_track_width}" z="0" flip="0" />
<xacro:front_wheel name="fl" x="${half_wheelbase}" y="${half_front_track_width}" z="0" flip="1" />
<xacro:front_wheel name="fr" x="${half_wheelbase}" y="${-half_front_track_width}" z="0" flip="0" />
<xacro:property name="wheel_friction" value="1.75" />
<gazebo reference="base_link" >
<mu1>0.5</mu1>
<mu2>0.5</mu2>
</gazebo>
<gazebo reference="wheel_fl" >
<mu1>${wheel_friction}</mu1>
<mu2>${wheel_friction}</mu2>
</gazebo>
<gazebo reference="wheel_fr" >
<mu1>${wheel_friction}</mu1>
<mu2>${wheel_friction}</mu2>
</gazebo>
<gazebo reference="wheel_rl" >
<mu1>${wheel_friction}</mu1>
<mu2>${wheel_friction}</mu2>
</gazebo>
<gazebo reference="wheel_rr" >
<mu1>${wheel_friction}</mu1>
<mu2>${wheel_friction}</mu2>
</gazebo>
<!-- 激光雷达 link -->
<link name="lidar_link">
<inertial>
<mass value="0.1" />
<origin xyz="0 0 0" />
<inertia ixx="0.01" ixy="0.0" ixz="0.0" iyy="0.01" iyz="0.0" izz="0.01" />
</inertial>
<visual>
<geometry><cylinder radius="0.05" length="0.07"/></geometry>
<material name="black"><color rgba="0 0 0 1"/></material>
</visual>
<collision>
<geometry><cylinder radius="0.05" length="0.07"/></geometry>
</collision>
</link>
<joint name="lidar_joint" type="fixed">
<parent link="base_link"/>
<child link="lidar_link"/>
<origin xyz="1.2 0 1.4" rpy="0 0 0"/>
</joint>
<!-- IMU link -->
<link name="imu_link">
<inertial>
<mass value="0.01" />
<inertia ixx="0.001" ixy="0" ixz="0" iyy="0.001" iyz="0" izz="0.001" />
</inertial>
</link>
<joint name="imu_joint" type="fixed">
<parent link="base_link"/>
<child link="imu_link"/>
<origin xyz="0 0 0" rpy="0 0 0"/>
</joint>
<!-- 激光雷达插件 -->
<gazebo reference="lidar_link">
<sensor name="lidar" type="ray">
<always_on>true</always_on>
<visualize>false</visualize>
<update_rate>10</update_rate>
<ray>
<scan>
<horizontal>
<samples>1800</samples>
<min_angle>-3.1415926</min_angle>
<max_angle>3.1415926</max_angle>
</horizontal>
<vertical>
<samples>32</samples>
<min_angle>-0.26</min_angle>
<max_angle>0.26</max_angle>
</vertical>
</scan>
<range>
<min>0.3</min>
<max>100.0</max>
</range>
</ray>
<plugin name="lidar_plugin" filename="libgazebo_ros_ray_sensor.so">
<ros>
<remapping>~/out:=/points_raw</remapping>
</ros>
<output_type>sensor_msgs/PointCloud2</output_type>
<frame_name>lidar_link</frame_name>
</plugin>
</sensor>
</gazebo>
<!-- IMU 插件:必须套在 sensor type="imu" 里,否则不会产生数据 -->
<gazebo reference="imu_link">
<sensor name="imu_sensor" type="imu">
<always_on>true</always_on>
<update_rate>200</update_rate>
<imu>
<noise>
<type>gaussian</type>
<rate>
<mean>0.0</mean>
<stddev>0.0002</stddev>
</rate>
<accel>
<mean>0.0</mean>
<stddev>0.017</stddev>
</accel>
</noise>
</imu>
<plugin name="imu_plugin" filename="libgazebo_ros_imu_sensor.so">
<ros>
<remapping>~/out:=/imu_raw</remapping>
</ros>
<initial_orientation_as_reference>false</initial_orientation_as_reference>
</plugin>
</sensor>
</gazebo>
<!-- GPS link -->
<link name="gps_link">
<inertial>
<mass value="0.01" />
<inertia ixx="0.001" ixy="0" ixz="0" iyy="0.001" iyz="0" izz="0.001" />
</inertial>
<visual>
<geometry><box size="0.1 0.1 0.05"/></geometry>
<material name="white"><color rgba="1 1 1 1"/></material>
</visual>
</link>
<joint name="gps_joint" type="fixed">
<parent link="base_link"/>
<child link="gps_link"/>
<origin xyz="-0.5 0 1.5" rpy="0 0 0"/>
</joint>
<!-- GPS 插件 -->
<gazebo reference="gps_link">
<sensor name="gps_sensor" type="gps">
<always_on>true</always_on>
<update_rate>10.0</update_rate>
<plugin name="gps_controller" filename="libgazebo_ros_gps_sensor.so">
<ros>
<remapping>~/out:=/gps/fix</remapping>
</ros>
<frame_name>gps_link</frame_name>
<referenceLatitude>1.3521</referenceLatitude>
<referenceLongitude>103.8198</referenceLongitude>
<referenceHeading>0</referenceHeading>
<referenceAltitude>10</referenceAltitude>
<offset>0 0 0</offset>
<drift>0.0001 0.0001 0.0001</drift>
<gaussianNoise>0.0001 0.0001 0.0001</gaussianNoise>
<velocityDrift>0 0 0</velocityDrift>
<velocityGaussianNoise>0.0001 0.0001 0.0001</velocityGaussianNoise>
</plugin>
</sensor>
</gazebo>
</robot>在测试时遇到的问题解决: PCD 保存路径不存在
直接创建这个目录:
bash
mkdir -p ~/LIO-SAM/src/maps问题二(核心问题):TF 树断开
报错 lidar_link and base_link are not part of the same tree 的原因是:LIO-SAM 启动了自己的 robot_state_publisher,用的是它自带的 robot.urdf.xacro,这个 URDF 里的 TF 树和 Gazebo 发布的不一致,两棵树打架了。
需要修改 LIO-SAM 的 launch 文件,把它自带的 robot_state_publisher 禁掉,因为 Gazebo 那边已经在发布 TF 了:
bash
code ~/carplaning/liosam_ws/src/LIO-SAM/launch/run.launch.py找到 robot_state_publisher 相关的节点定义,在它前面加 # 注释掉,类似这样:
python
# Node(
# package='robot_state_publisher',
# executable='robot_state_publisher',
# ...
# ),修改后的完整代码:
import os
from ament_index_python.packages import get_package_share_directory
from launch import LaunchDescription
from launch.actions import DeclareLaunchArgument
from launch.substitutions import LaunchConfiguration, Command
from launch_ros.actions import Node
def generate_launch_description():
share_dir = get_package_share_directory('lio_sam')
parameter_file = LaunchConfiguration('params_file')
xacro_path = os.path.join(share_dir, 'config', 'robot.urdf.xacro')
rviz_config_file = os.path.join(share_dir, 'config', 'rviz2.rviz')
params_declare = DeclareLaunchArgument(
'params_file',
default_value=os.path.join(
share_dir, 'config', 'params.yaml'),
description='FPath to the ROS2 parameters file to use.')
print("urdf_file_name : {}".format(xacro_path))
return LaunchDescription([
params_declare,
Node(
package='tf2_ros',
executable='static_transform_publisher',
arguments='0.0 0.0 0.0 0.0 0.0 0.0 map odom'.split(' '),
parameters=[parameter_file],
output='screen'
),
# Node(
# package='robot_state_publisher',
# executable='robot_state_publisher',
# name='robot_state_publisher',
# output='screen',
# parameters=[{
# 'robot_description': Command(['xacro', ' ', xacro_path])
# }]
# ),
Node(
package='lio_sam',
executable='lio_sam_imuPreintegration',
name='lio_sam_imuPreintegration',
parameters=[parameter_file],
remappings=[('/imu/data', '/imu_raw')],
output='screen'
),
Node(
package='lio_sam',
executable='lio_sam_imageProjection',
name='lio_sam_imageProjection',
parameters=[parameter_file],
remappings=[('/imu/data', '/imu_raw'), ('/points', '/points_raw')],
output='screen'
),
Node(
package='lio_sam',
executable='lio_sam_featureExtraction',
name='lio_sam_featureExtraction',
parameters=[parameter_file],
output='screen'
),
Node(
package='lio_sam',
executable='lio_sam_mapOptimization',
name='lio_sam_mapOptimization',
parameters=[parameter_file],
output='screen'
),
Node(
package='rviz2',
executable='rviz2',
name='rviz2',
arguments=['-d', rviz_config_file],
output='screen'
)
])问题三:Large velocity 警告 ==这个在上面就已经修改,这里无需再次修改== 这是 IMU 坐标系和 LIO-SAM 期望的不一致导致的。Gazebo 的 IMU 默认输出是 ENU 坐标系,但 LIO-SAM 期望 ROS 标准的坐标系。把 params.yaml 里的外参旋转矩阵改一下:
extrinsicRot: [1.0, 0.0, 0.0,
0.0, -1.0, 0.0,
0.0, 0.0, -1.0]
extrinsicRPY: [1.0, 0.0, 0.0,
0.0, -1.0, 0.0,
0.0, 0.0, -1.0]问题四:静态变换把两棵树桥接起来
打开文件:
code ~/carplaning/liosam_ws/src/audibot/audibot_gazebo/launch/slam_sim.launch.py在 return LaunchDescription([ 前面加入这个节点定义:
# 桥接 LIO-SAM 的 odom 和 Gazebo 的 world,否则 TF 树断开
bridge_tf = Node(
package='tf2_ros',
executable='static_transform_publisher',
name='odom_world_bridge',
arguments=['0', '0', '0', '0', '0', '0', 'odom', 'world']
)然后把 return LaunchDescription 里也加上:
return LaunchDescription([
gazebo,
robot_state_publisher,
spawn_robot,
bridge_tf, # 新加这一行
])重新编译:
cd ~/carplaning/liosam_ws
colcon build --symlink-install
source install/setup.bash仿真LIO-SAM测试
终端1:启动仿真
cd ~/carplaning/liosam_ws
source install/setup.bash
ros2 launch audibot_gazebo slam_sim.launch.py等 Gazebo 完全加载好再继续。
终端2:启动 LIO-SAM
cd ~/carplaning/liosam_ws
source install/setup.bash
ros2 launch lio_sam run.launch.py终端3:开启油门中间层
cd ~/carplaning/liosam_ws
source install/setup.bash
ros2 launch audibot_gazebo cmd_vel_control.launch.py robot_name:=audibot终端4:键盘控制节点
cd ~/carplaning/liosam_ws
source install/setup.bash
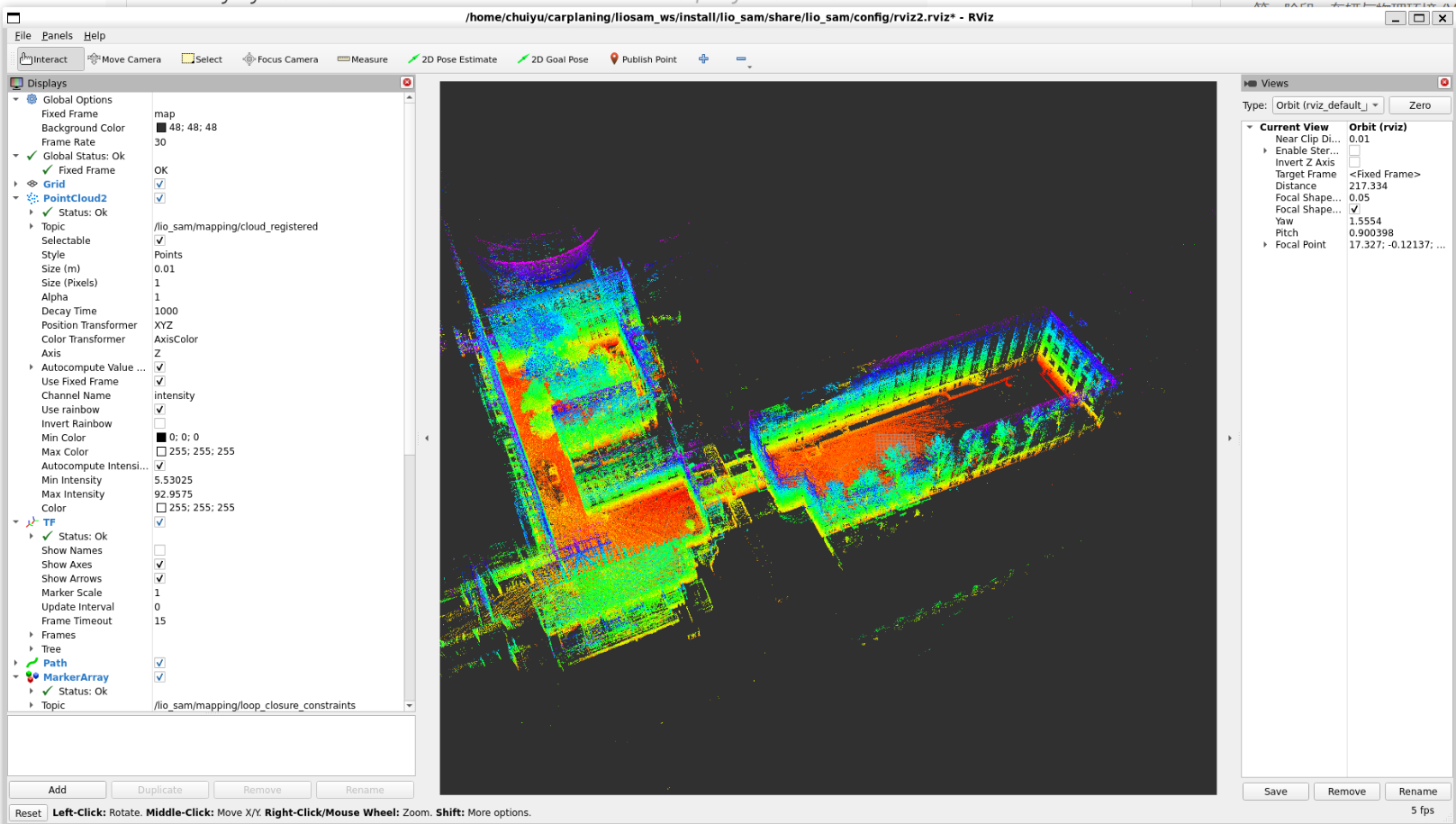
ros2 run teleop_twist_keyboard teleop_twist_keyboard --ros-args -r cmd_vel:=/audibot/cmd_vel预期效果如下图: