1.WSL2环境下ROS2 topic list 无反应
现象
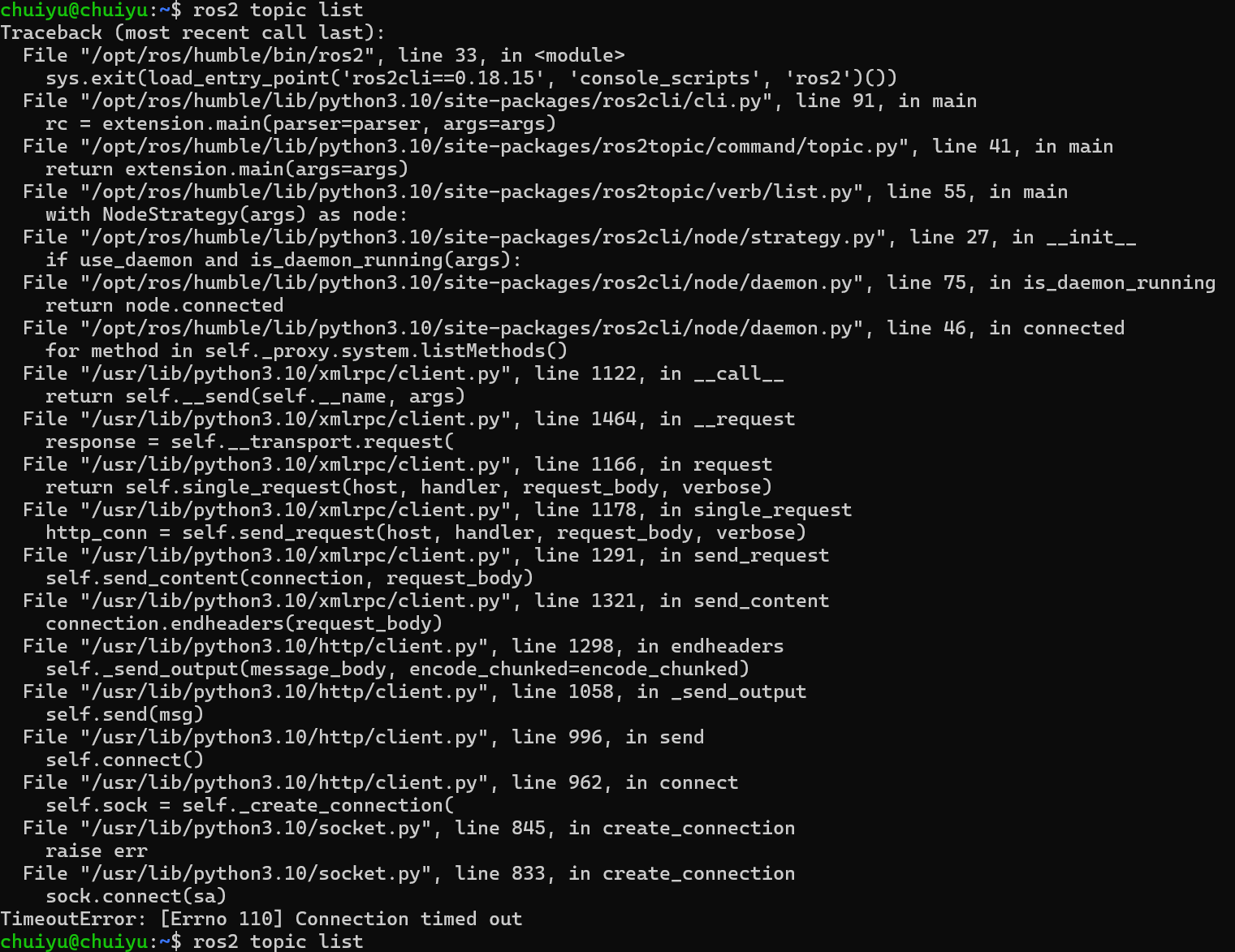
解决
wsl2 ROS2 出现ros2 topic list错误(超时Connection timed out/没有topic)节点通讯错误| wsl_ros2 daemon start-CSDN博客
2026-2-27补充: ros2 daemon status 命令用于检查 ROS 2 的守护进程是否正在运行。当你看到上述错误时,这通常意味着客户端尝试通过 XML-RPC 与守护进程通信时遇到了问题,连接被对方重置了。
这里有几个可能的解决步骤:
检查守护进程是否确实在运行:
确保你已经在你的系统上启动了ros2 daemon。你可以使用ps命令或systemctl(如果你是在使用支持它的系统上)来检查。例如,使用
ps命令:bashps aux | grep ros2_daemon或者使用
systemctl(如果适用):bashsystemctl status ros2-daemon.service重新启动守护进程:
如果守护进程没有运行,尝试启动它:bashros2 daemon start然后再次检查状态:
bashros2 daemon status检查防火墙和网络设置:
确保没有任何防火墙或网络策略阻止了对守护进程端口的访问。ROS 2 守护进程默认使用 XML-RPC,通常是在 11311 端口上。