基于 RTK 的校园自主导航机器人
功能模块任务拆分文档
版本:v1.0 · 2026年4月 · 本文档供项目成员任务认领使用
硬件/软件清单
| 硬件/软件 | 型号 | 状态 |
|---|---|---|
| 计算平台 | Jetson Xavier NX | ✅ 运行中 |
| 激光雷达 | Livox Mid-360 | ✅ 驱动就绪 |
| 定位模块 | UM982 RTK 双天线 | ✅ 驱动就绪(CPU待优化) |
| 底盘 | 四轮差速 + GJB520 × 4 | ✅ 驱动就绪 |
| 主控 | STM32 + yahboomcar驱动 | ✅ 运行中 |
| 导航栈 | ROS2 Humble + Nav2 | ⏳ 待接入 |
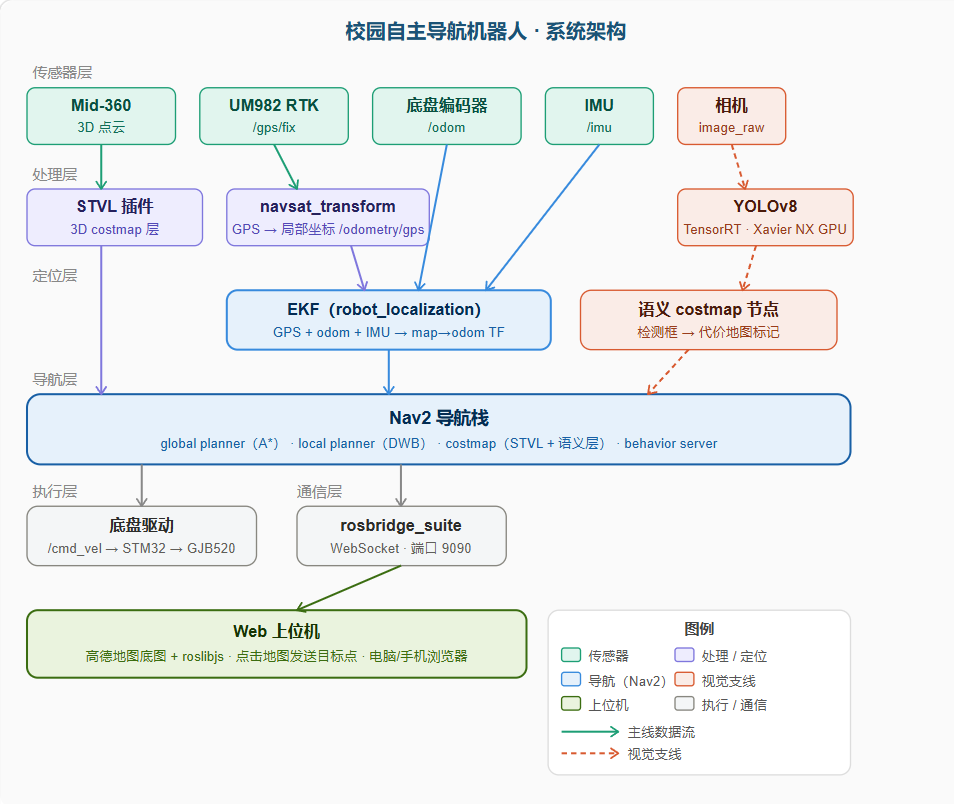
0. 项目总体架构
本项目目标:在校园室外硬化路面环境中,输入一个 RTK 坐标,机器人自主规划路径、实时避障并到达目标位置。
整体分为三条并行开发线:
- 主线:Nav2 无图导航(核心功能,其他模块依赖此模块跑通)
- 支线A:Web 上位机(地图可视化 + 手机/电脑操控界面)
- 支线B:视觉语义避障(YOLO 识别行人/车辆,增强 costmap)
当前优先级: 1.2 UM982优化 → 1.1 STVL接入 → 1.3 EKF调参 → 1.4 联调 → 支线并行
1. 主线:Nav2 无图导航
1.1 Mid-360 3D点云接入 Nav2
仿真阶段用 2D 激光雷达是为了简化验证,实物阶段使用 Mid-360 的 3D 点云直接接入 Nav2,采用 spatio_temporal_voxel_layer 作为 costmap 层,可感知不同高度的障碍物(台阶、低矮障碍物等)。
技术路线
- 安装配置
spatio_temporal_voxel_layer(stvl)插件 - 修改
nav2_params.yaml,将 local/global costmap 的obstacle_layer替换为 stvl - 配置点云话题订阅:
/livox/lidar→ stvl - 调整体素分辨率、清除时间等参数,在 Rviz 中验证 costmap 生成正确
- 测试静态障碍物、移动障碍物的感知效果
关键参数
# nav2_params.yaml 修改示例
local_costmap:
local_costmap:
ros__parameters:
plugins: ["stvl_layer", "inflation_layer"]
stvl_layer:
plugin: "spatio_temporal_voxel_layer/SpatioTemporalVoxelLayer"
enabled: true
voxel_decay: 15.0 # 体素保留时间(秒)
decay_model: 0 # 0=线性衰减
voxel_size: 0.05 # 体素分辨率(米)
track_unknown_space: true
observation_sources: livox_pointcloud
livox_pointcloud:
topic: /livox/lidar
data_type: PointCloud2
marking: true
clearing: true
min_obstacle_height: 0.1
max_obstacle_height: 2.0⚠️ 注意: Xavier NX 当前 CPU 已约 90%,stvl 比 2D laserscan 方案更耗资源。务必先关闭 Rviz 在车上运行,改用远程电脑连接查看。
| 子任务 | 主要工作内容 | 难度 |
|---|---|---|
| 安装 stvl 依赖并编译 | sudo apt install ros-humble-spatio-temporal-voxel-layer,验证编译通过 | 入门 |
| 修改 nav2_params.yaml | 将两个 costmap 的插件替换为 stvl,配置点云话题和体素参数 | 中等 |
| 静态障碍物测试 | 在 Rviz 中确认 costmap 能正确标记静态障碍物 | 入门 |
| 动态障碍物测试 | 行人走过时 costmap 能标记并在离开后清除 | 中等 |
1.2 UM982 CPU 占用排查与优化
当前 um982_node 占用 63% CPU 不合理(正常应低于 10%),需在接入 Nav2 前解决,否则系统无法稳定运行。
排查方向
- 检查串口读取方式:是否使用忙等待(
while True轮询)而非中断/select 机制 - 检查解析频率:UM982 输出频率是否过高(建议 GPS 10Hz,航向 10Hz 即可)
- 检查是否有不必要的话题发布(每帧都序列化发布会增加 CPU 开销)
排查命令
# 查看 um982_node 的线程占用
top -H -p $(pgrep -f um982_node)
# 查看串口实际接收频率
ros2 topic hz /gps/fix
ros2 topic hz /imu/data
# 查看节点发布的所有话题
ros2 node info /um982_node| 子任务 | 主要工作内容 | 难度 |
|---|---|---|
| 排查 CPU 异常原因 | 用 top/perf 定位热点,判断是串口读取还是解析逻辑问题 | 中等 |
| 优化串口读取 | 改为 select/epoll 非阻塞读取,避免忙等待 | 较难 |
| 降低不必要发布频率 | GPS 位置 10Hz、航向 10Hz,IMU 可保留 100Hz | 入门 |
1.3 EKF + RTK 定位融合调参
仿真阶段已验证 EKF 融合框架,实物阶段需要针对真实传感器噪声进行调参,使定位输出平滑稳定。
技术路线
- 确认 UM982 输出话题格式与
navsat_transform兼容(NavSatFix + 航向角) - 在空旷场地静止放置,观察
/odometry/filtered的位置抖动范围 - 调整
ekf.yaml中各传感器的过程噪声协方差(Q矩阵) - 直线行驶 50 米,对比 RTK 原始轨迹和 EKF 融合轨迹,验证融合效果
- GPS 信号遮挡测试(在高楼旁/树荫下),观察定位漂移情况
| 子任务 | 主要工作内容 | 难度 |
|---|---|---|
| 话题格式验证 | 确认 UM982 驱动输出的 NavSatFix 格式正确,航向角话题可用 | 入门 |
| 静止抖动测试 | 记录静止时 /odometry/filtered 的 x/y 抖动,应 < 0.3m | 入门 |
| EKF 协方差调参 | 根据实测噪声调整 Q/R 矩阵,使输出平滑 | 较难 |
| 遮挡场景测试 | 记录 RTK Fix/Float 切换时的定位连续性 | 中等 |
1.4 Nav2 整体联调
所有子模块就绪后,进行 Nav2 全栈联调,验证端到端导航效果。
验收标准
- 在校园空旷路面,输入 50 米外的 RTK 坐标,小车能自主导航到达,误差 < 1 米
- 路径上放置纸箱,小车能检测到并绕行
- 行人横穿路径时,小车能减速等待或绕行
- 关闭 Rviz 后,系统 CPU 占用 < 80%,运行稳定
| 子任务 | 主要工作内容 | 难度 |
|---|---|---|
| 编写 hardware bringup launch | 整合所有真实硬件节点的启动文件,替换仿真版本 | 中等 |
| 空旷场地端到端测试 | 输入 RTK 坐标,验证能否到达目标点 | 中等 |
| 障碍物绕行测试 | 静态/动态障碍物场景测试 | 中等 |
| 长距离稳定性测试 | 连续运行 30 分钟,记录 CPU/内存/定位漂移 | 入门 |
2. 支线A:Web 上位机
开发一个网页端上位机,同时支持电脑浏览器和手机浏览器访问。集成高德地图作为背景,通过 rosbridge 与 ROS2 通信,实现地图可视化和导航控制。
2.1 系统架构
Xavier NX(ROS2)
↓ rosbridge_suite(WebSocket,端口 9090)
↓
浏览器(电脑/手机)
├── 高德地图 JS SDK(显示卫星地图底图)
├── roslibjs(订阅 /odometry/filtered,实时显示小车位置)
├── 点击地图 → 转换为 RTK 坐标 → 发布到 /goal_pose
└── 订阅 /scan 或 /livox/lidar → 显示障碍物2.2 技术路线
后端(ROS2 侧)
- 安装 rosbridge_suite:
ros2 launch rosbridge_server rosbridge_websocket_launch.xml - 确认 Xavier NX 和客户端设备在同一局域网(或配置内网穿透)
- 编写坐标转换节点:将高德地图经纬度坐标转换为 Nav2 的 map 坐标系目标点
前端(Web 侧)
- 使用高德地图 JS API 2.0 显示卫星底图
- 引入 roslibjs 库,通过 WebSocket 连接 rosbridge
- 订阅
/odometry/filtered,在地图上实时更新小车位置标记 - 用户点击地图位置 → 发布
geometry_msgs/PoseStamped到/goal_pose - 订阅
/livox/lidar或 costmap 话题,在地图上叠加显示障碍物
关键代码片段
// 连接 rosbridge
const ros = new ROSLIB.Ros({ url: 'ws://192.168.x.x:9090' });
// 订阅小车位置
const odomSub = new ROSLIB.Topic({
ros, name: '/odometry/filtered',
messageType: 'nav_msgs/Odometry'
});
odomSub.subscribe(msg => {
const x = msg.pose.pose.position.x;
const y = msg.pose.pose.position.y;
// 转换为经纬度后更新地图标记
});
// 发布导航目标
const goalPub = new ROSLIB.Topic({
ros, name: '/goal_pose',
messageType: 'geometry_msgs/PoseStamped'
});
// 用户点击地图时调用
goalPub.publish({ header: {...}, pose: { position: {x, y, z:0}, orientation: {w:1} } });| 子任务 | 主要工作内容 | 难度 |
|---|---|---|
| 部署 rosbridge_suite | 在 Xavier NX 安装并启动 rosbridge,验证 WebSocket 连通 | 入门 |
| 高德地图基础页面 | 创建 HTML 页面,集成高德地图卫星底图,申请 API Key | 入门 |
| roslibjs 接入 | 在页面中连接 rosbridge,订阅话题并在控制台打印验证 | 入门 |
| 小车位置实时显示 | 将 /odometry/filtered 的坐标转换为经纬度,在地图上显示标记 | 中等 |
| 点击地图发送目标点 | 点击地图获取经纬度,转为 map 坐标系,发布到 /goal_pose | 中等 |
| 坐标系转换节点 | 编写 ROS2 节点,处理 Web 端发来的经纬度并转为导航目标 | 较难 |
| 手机端适配 | CSS 响应式布局,确保手机浏览器正常使用 | 入门 |
| 障碍物/costmap 可视化 | 在地图上叠加显示障碍物或 costmap 数据(可选进阶) | 较难 |
3. 支线B:YOLO 语义避障
利用 Xavier NX 的 GPU,运行 YOLO 目标检测模型识别行人、车辆等动态障碍物,将检测结果以代价地图的形式叠加到 Nav2 的 costmap 中,增强动态避障能力。
3.1 系统架构
相机图像 (/camera/image_raw)
↓
YOLO 检测节点(TensorRT 加速)
↓ 检测框 + 类别 + 置信度
语义 costmap 节点
↓ 将检测到的障碍物投影到 costmap
Nav2 costmap(叠加语义层)
↓
规划器绕行动态障碍物3.2 技术路线
阶段一:YOLO 部署
- 选用 YOLOv8n(nano 版本,适合 Xavier NX 实时推理)
- 使用 TensorRT 将模型转换为
.engine格式,推理速度提升 3-5 倍 - 发布检测结果话题:类别、置信度、2D 边界框
阶段二:深度融合
- 用 Mid-360 点云或双目相机获取障碍物深度,将 2D 检测框投影到 3D 空间
- 计算障碍物在 map 坐标系中的位置和大小
阶段三:costmap 集成
- 编写自定义 costmap 插件,订阅检测结果并在对应位置标记代价值
- 对行人标记更高代价(更大安全距离),对静态障碍物正常标记
- 实现时间衰减:目标离开后,对应 costmap 区域逐渐清除
# Xavier NX 上运行 TensorRT 加速的 YOLOv8
pip install ultralytics
# 导出 TensorRT engine
yolo export model=yolov8n.pt format=engine device=0
# 推理测试(验证帧率)
yolo predict model=yolov8n.engine source=0 show=true📌 Xavier NX GPU 性能参考: YOLOv8n TensorRT 推理约 30-60 FPS,YOLOv8s 约 15-30 FPS。建议先用 nano 版本验证流程,再考虑换更大的模型。
| 子任务 | 主要工作内容 | 难度 |
|---|---|---|
| 相机驱动接入 | 确认相机话题 /camera/image_raw 正常发布 | 入门 |
| YOLOv8 基础运行 | 在 Xavier NX 上安装 ultralytics,跑通 CPU 推理 | 入门 |
| TensorRT 加速 | 导出 .engine 文件,验证 GPU 推理帧率 > 20FPS | 中等 |
| 封装为 ROS2 节点 | 检测结果发布为 vision_msgs/Detection2DArray 话题 | 中等 |
| 3D 位置估计 | 结合点云获取障碍物深度,投影到 map 坐标系 | 较难 |
| 自定义 costmap 插件 | 编写 nav2_costmap_2d 插件,将检测结果写入代价地图 | 较难 |
| 联调测试 | 行人走过时,costmap 能标记并引导小车绕行 | 中等 |
4. 新成员推荐上手路径
建议大一同学按以下顺序推进,避免在环境配置上卡太久:
Week 1-2:环境熟悉
- 在自己电脑上安装 Ubuntu 22.04 + ROS2 Humble(虚拟机也可)
- 完成 ROS2 官方 beginner tutorials,理解话题/节点/launch 的基本概念
- clone 项目仓库(simulation 分支),在本地跑通仿真导航
Week 3-4:认领子任务
- 根据兴趣选择一个模块(导航调参 / Web前端 / YOLO视觉)
- 阅读对应模块的技术路线,搭建本地开发环境
- 先完成第一个「入门」难度的子任务,验证链路通畅
Week 5+:迭代开发
- 每周同步进展,遇到问题及时提出
- 优先保证 1.1 主线跑通,支线模块可以并行推进
💡 给新成员的建议: ROS2 学习曲线陡峭,前两周不要急于上手硬件。先把仿真跑通,理解数据流向,再动真实硬件事半功倍。