【3-2】LED&流水灯&蜂鸣器
1.LED闪烁
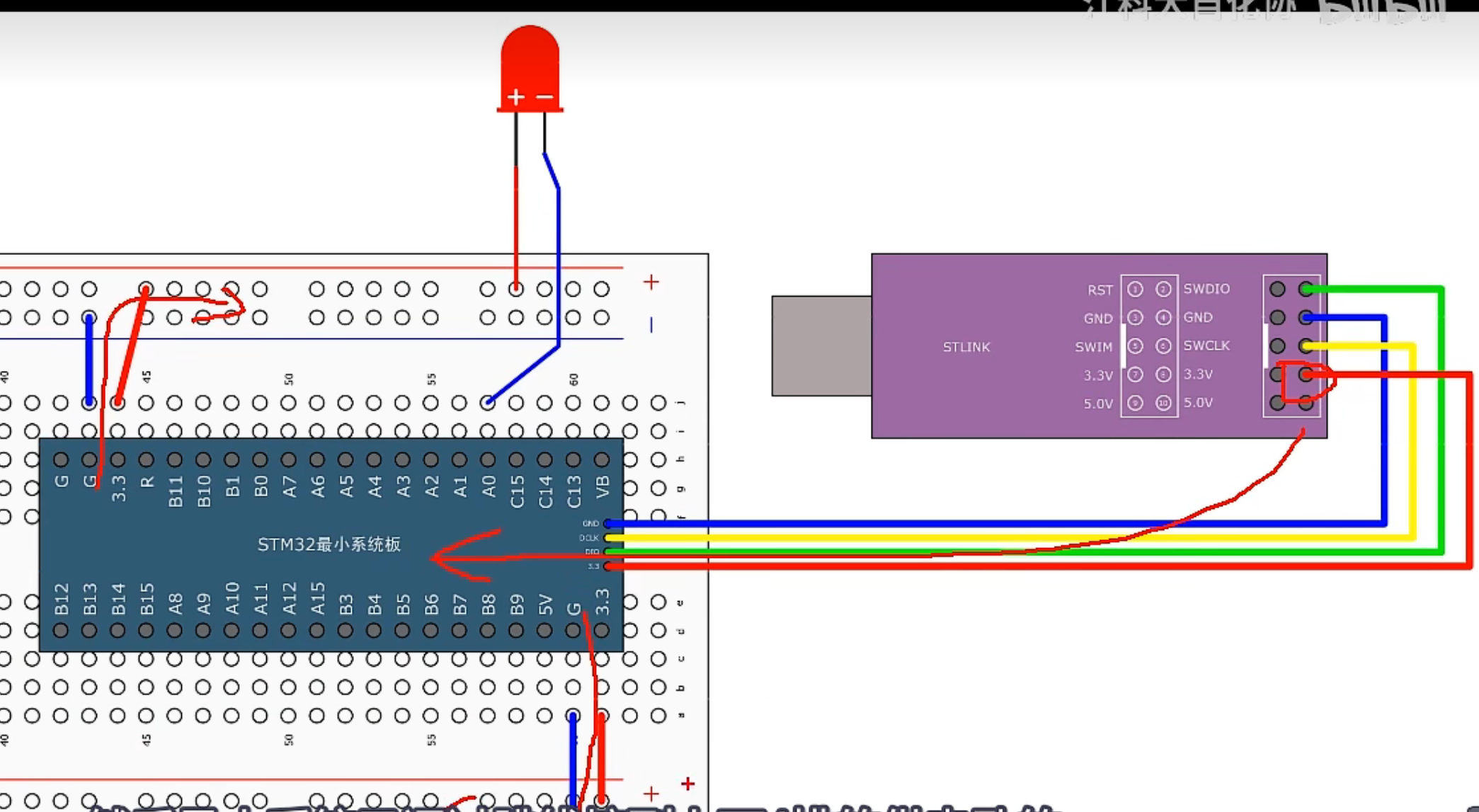
接线图:
程序代码:
插入:GPIO常用的输出函数
c
void GPIO_SetBits(GPIO_TypeDef* GPIOx, uint16_t GPIO_Pin);
//填入参数 1.GPIOx 2.GPIO_Pin
//函数功能 把指定的端口设置为高电平c
void GPIO_ResetBits(GPIO_TypeDef* GPIOx, uint16_t GPIO_Pin);
//填入参数 1.GPIOx 2.GPIO_Pin
//函数功能 把指定的端口设置为低电平c
void GPIO_WriteBit(GPIO_TypeDef* GPIOx, uint16_t GPIO_Pin, BitAction BitVal);
//填入参数 1.GPIOx 2.GPIO_Pin 3.BitVal
//函数功能 根据第三个参数的值来设置指定的端口
//下面是对参数3的介绍:
/*
* @param BitVal: 指定要写入选定位的值。
* 此参数可以是 BitAction 枚举值之一
* @arg Bit_RESET: 清除端口引脚
* @arg Bit_SET: 设置端口引脚
*/c
void GPIO_Write(GPIO_TypeDef* GPIOx, uint16_t PortVal);
//填入参数 1.GPIOx 2.PortValue
//函数功能 可以同时对16个端口进行写入操作程序实例
c
#include "stm32f10x.h"
#include "Delay.h"
/*
操作STM32的GPIO总共需要三个步骤:
1.使用RCC开启GPIO的时钟
2.使用GPIO_Iint函数初始化GPIO
3.使用输出或者输入函数控制GPIO口
*/
int main(void)
{
//使用RCC开启GPIO的时钟
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA,ENABLE);
GPIO_InitTypeDef GPIO_InitStruct; //定义结构体(可以理解为建立GPIO对象)
//配置结构体
GPIO_InitStruct.GPIO_Mode = GPIO_Mode_Out_PP; //模式为推挽输出
GPIO_InitStruct.GPIO_Pin = GPIO_Pin_0; //P0口
GPIO_InitStruct.GPIO_Speed = GPIO_Speed_50MHz; //速度为50MHz
GPIO_Init(GPIOA,&GPIO_InitStruct); //初始化GPIO口
//使用第一种函数:把指定的端口设置为低电平
//GPIO_ResetBits(GPIOA,GPIO_Pin_0);
//使用第二种函数:把指定的端口设置为高电平
//GPIO_SetBits(GPIOA,GPIO_Pin_0);
//使用第三种函数:
//GPIO_WriteBit(GPIOA,GPIO_Pin_0,Bit_SET);
//GPIO_WriteBit(GPIOA,GPIO_Pin_0,Bit_RESET);
//第四种函数下个例程介绍
while(1)
{
//使用WriteBit函数来输出高低电平电灯
/*
GPIO_WriteBit(GPIOA,GPIO_Pin_0,Bit_RESET); //点亮LED灯
Delay_ms(500);
GPIO_WriteBit(GPIOA,GPIO_Pin_0,Bit_SET); //熄灭LED灯
Delay_ms(500);
*/
//使用SetBits和ResitBits函数来输出高低电平点灯
/*
GPIO_SetBits(GPIOA,GPIO_Pin_0);
Delay_ms(500);
GPIO_ResetBits(GPIOA,GPIO_Pin_0);
Delay_ms(500);
*/
//若使用1和0来决定高低电平
//则需要对1和0进行强制转换为BitAction的枚举类型
GPIO_WriteBit(GPIOA,GPIO_Pin_0,(BitAction)0); //点亮LED灯
Delay_ms(500);
GPIO_WriteBit(GPIOA,GPIO_Pin_0,(BitAction)1); //熄灭LED灯
Delay_ms(500);
}
} PS:
若GPIO的输出模式为推挽模式,无论将LED灯的正负极反接都是可以正常亮灭的,说明在推挽模式下,高低电平都是有驱动能力的。
若GPIO的输出模式为开漏输出模式(Out_OD),而LED不亮,说明开漏模式的高电平是没有驱动能力的。而低电平是有驱动能力的
一般情况下用推挽模式就行,而特殊情况才会用开漏等其他模式。
2.LED流水灯
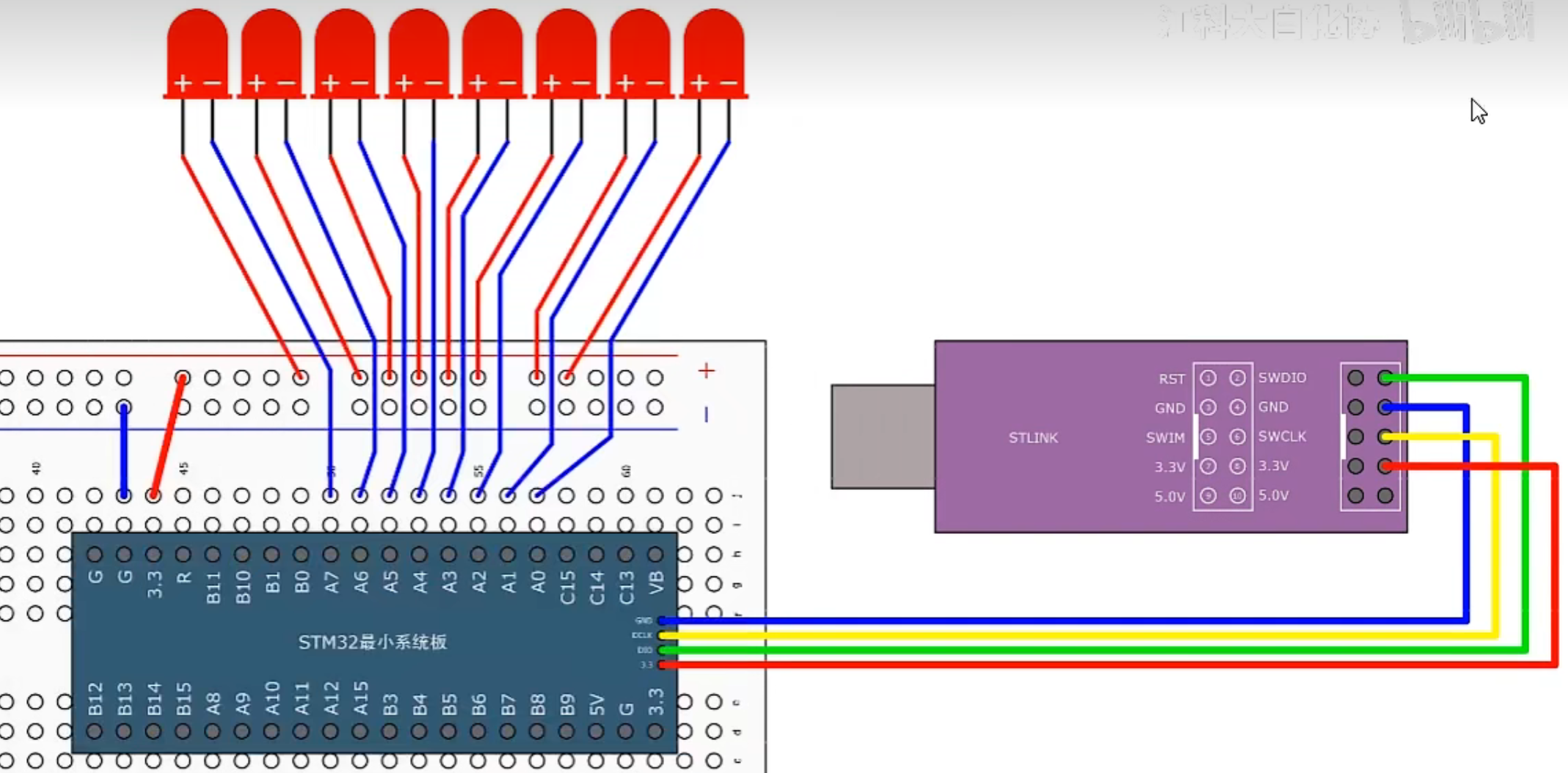
接线图
程序代码
c
#include "stm32f10x.h" // Device header
#include "Delay.h"
int main(void)
{
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA,ENABLE);
GPIO_InitTypeDef GPIO_InitStruct; //定义结构体(建立GPIO对象)
//配置结构体
GPIO_InitStruct.GPIO_Mode = GPIO_Mode_Out_PP; //模式为推挽输出
GPIO_InitStruct.GPIO_Pin = GPIO_Pin_All; //所有引脚
GPIO_InitStruct.GPIO_Speed = GPIO_Speed_50MHz; //速度为50MHz
GPIO_Init(GPIOA,&GPIO_InitStruct); //初始化GPIO口
while(1)
{
//此函数的第二个值的含义是:指定写到输出数据寄存器的值(ODR)
//而c语言不支持使用二进制数,所以写16进制数
//0x0001对应二进制数为 0000 0000 0000 0001
//因为是低电平点亮,所以在前面加一个按位取反的符号
//此时就是1111 1111 1111 1110,也就是第一个LED灯亮
GPIO_Write(GPIOA, ~0x0001);
Delay_ms(500);
GPIO_Write(GPIOA, ~0x0002); //0000 0000 0000 0010
Delay_ms(100); //延时100ms
GPIO_Write(GPIOA, ~0x0004); //0000 0000 0000 0100
Delay_ms(100); //延时100ms
GPIO_Write(GPIOA, ~0x0008); //0000 0000 0000 1000
Delay_ms(100); //延时100ms
GPIO_Write(GPIOA, ~0x0010); //0000 0000 0001 0000
Delay_ms(100); //延时100ms
GPIO_Write(GPIOA, ~0x0020); //0000 0000 0010 0000
Delay_ms(100); //延时100ms
GPIO_Write(GPIOA, ~0x0040); //0000 0000 0100 0000
Delay_ms(100); //延时100ms
GPIO_Write(GPIOA, ~0x0080); //0000 0000 1000 0000
Delay_ms(100); //延时100ms
}
}代码解释:
1.为什么11行配置结构体当中可以通过 | 来把几个IO口连起来定义呢?
因为GPIO0 = 0001 ,GPIO1 = 0010 , GPIO2 = 0100。
使用|运算之后:GPIO_Pin_0 | GPIO_Pin_1 | GPIO_Pin_2
就可以达到以下效果: 0111,即GPIO0-2都被定义了。
当然函数里还有GPIO_Pin_All可以使用(定义所有引脚嘛)
3.蜂鸣器
接线图
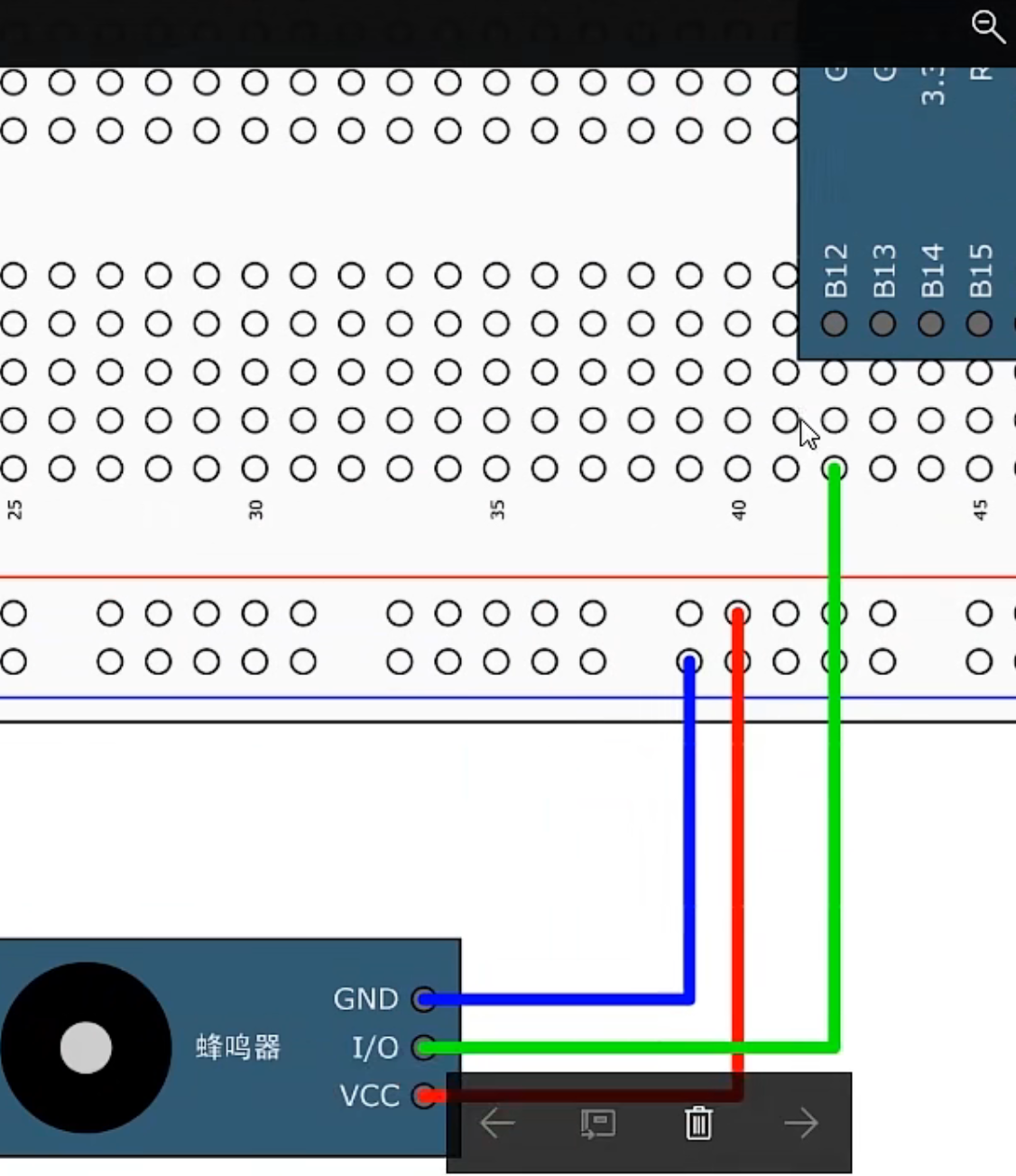
PS
I/O控制口别选到A15,B3,B4这三个,因为从引脚定义图可以看到,这三个口默认是JTAG的调试端口,如果要用作普通端口的话,还需要再进行一些配置。
程序代码
c
#include "stm32f10x.h" // Device header
#include "Delay.h"
int main(void)
{
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB,ENABLE);
GPIO_InitTypeDef GPIO_InitStruct; //定义结构体(建立GPIO对象)
//配置结构体
GPIO_InitStruct.GPIO_Mode = GPIO_Mode_Out_PP; //模式为推挽输出
GPIO_InitStruct.GPIO_Pin = GPIO_Pin_12; //所有引脚
GPIO_InitStruct.GPIO_Speed = GPIO_Speed_50MHz; //速度为50MHz
GPIO_Init(GPIOB,&GPIO_InitStruct); //初始化GPIO口
while(1)
{
GPIO_ResetBits(GPIOB,GPIO_Pin_12);
Delay_ms(100);
GPIO_SetBits(GPIOB,GPIO_Pin_12);
Delay_ms(100);
GPIO_ResetBits(GPIOB,GPIO_Pin_12);
Delay_ms(100);
GPIO_SetBits(GPIOB,GPIO_Pin_12);
Delay_ms(700);
}
}使用库函数的方法
1.打开.h文件的最后,看一下都有哪些函数,然后再右键转到定义,查看以下函数和参数的用法。这里都是英文的,看不懂借助翻译就行。
2.查看配套资料里的库函数用户手册,里面有所有库函数的中文解释说明,而且函数后面还有使用例子,需要用的话可以直接引用。但是这个用户手册的版本并不对应我们现在用的库函数的版本,所以有部分用法会有一些出入,但是整体上差异都不大。
3.百度搜索,查看别人的代码。