FreeRTOS操作系统移植教程-纯操作
1.准备资料
去到FreeRTOS官网下载源码:FreeRTOS™ - FreeRTOS™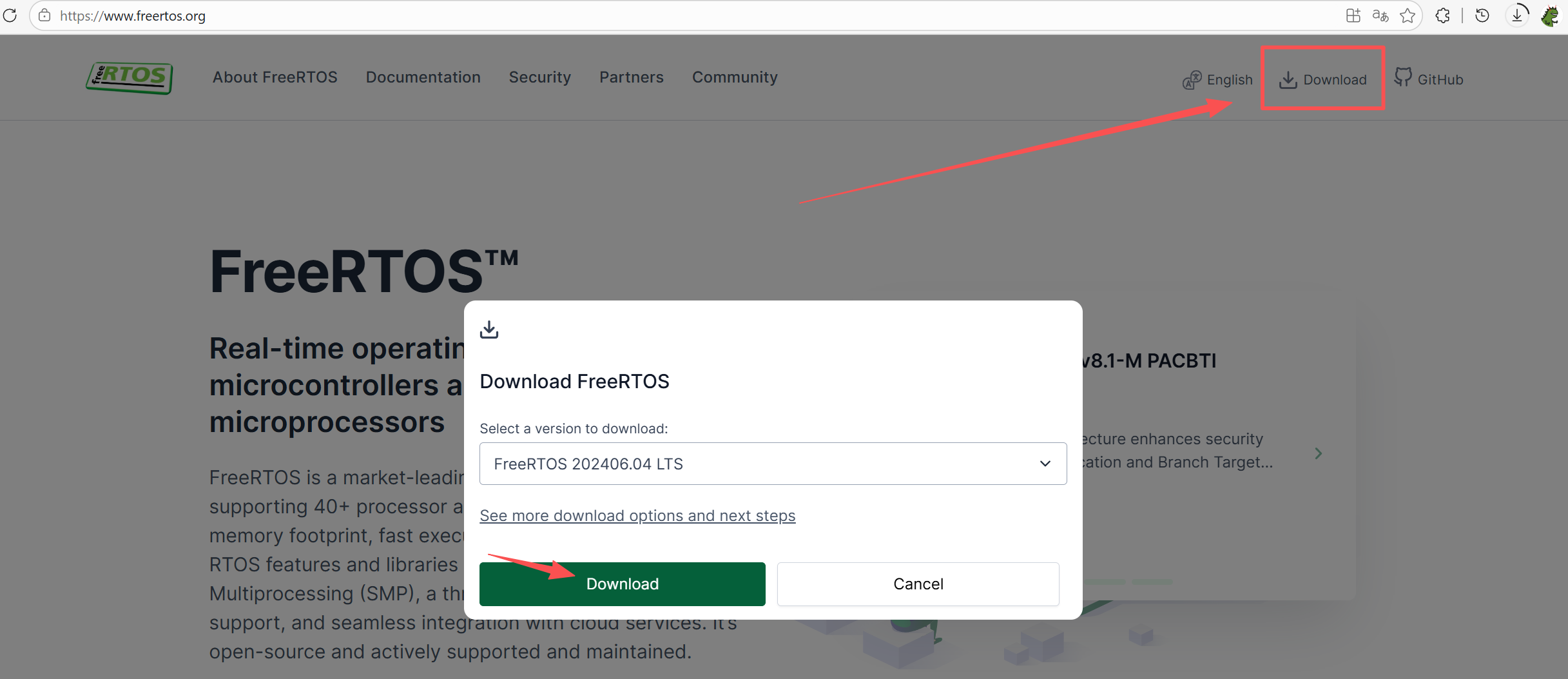
然后准备标准库工程模板: 
即是下面这两个文件:  首先,我们在工程模板里新建一个FreeRTOS的文件夹:
首先,我们在工程模板里新建一个FreeRTOS的文件夹: 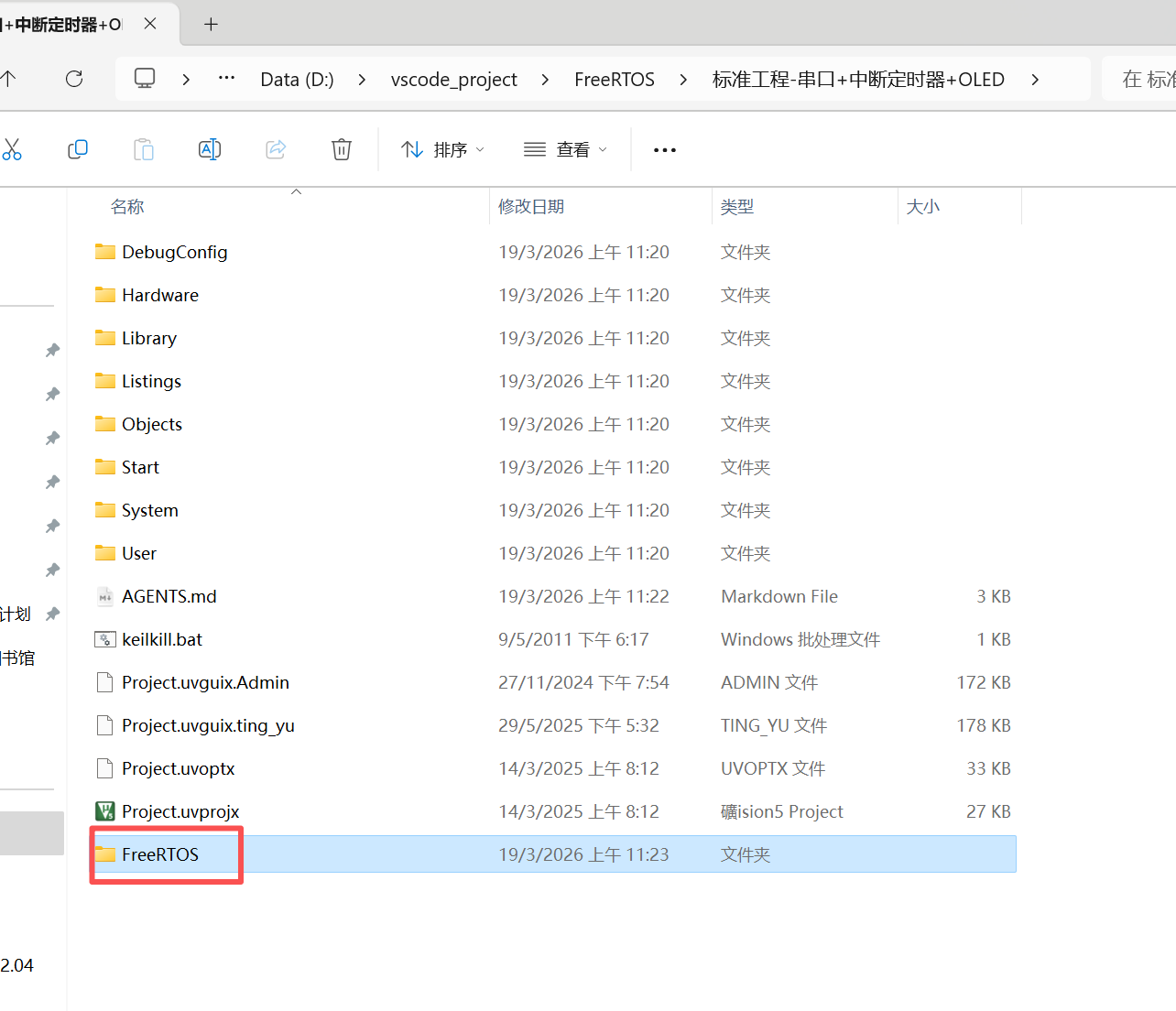 然后再在FreeRTOS中新建三个文件夹:分别是inc、port、src
然后再在FreeRTOS中新建三个文件夹:分别是inc、port、src 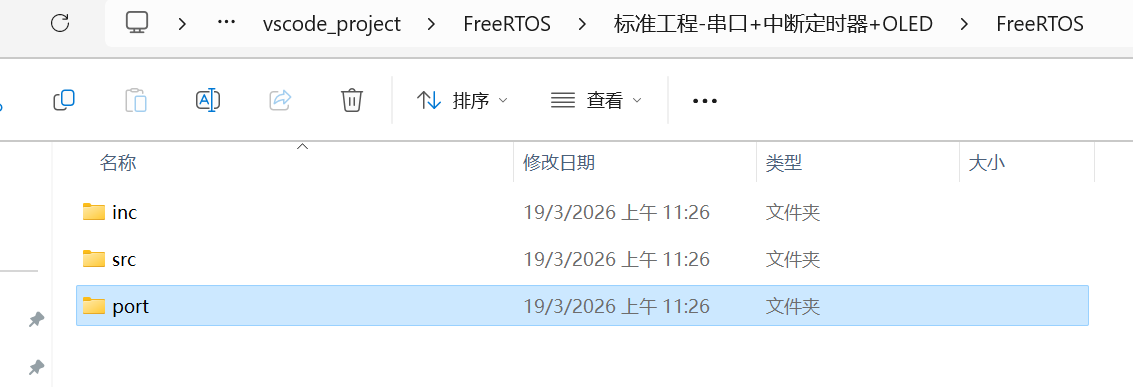
然后,去到Free RTOS源码的下面的目录中:
FreeRTOS\FreeRTOS-LTS\FreeRTOS\FreeRTOS-Kernel\include把该目录下的所有文件全部复制到inc文件夹中: 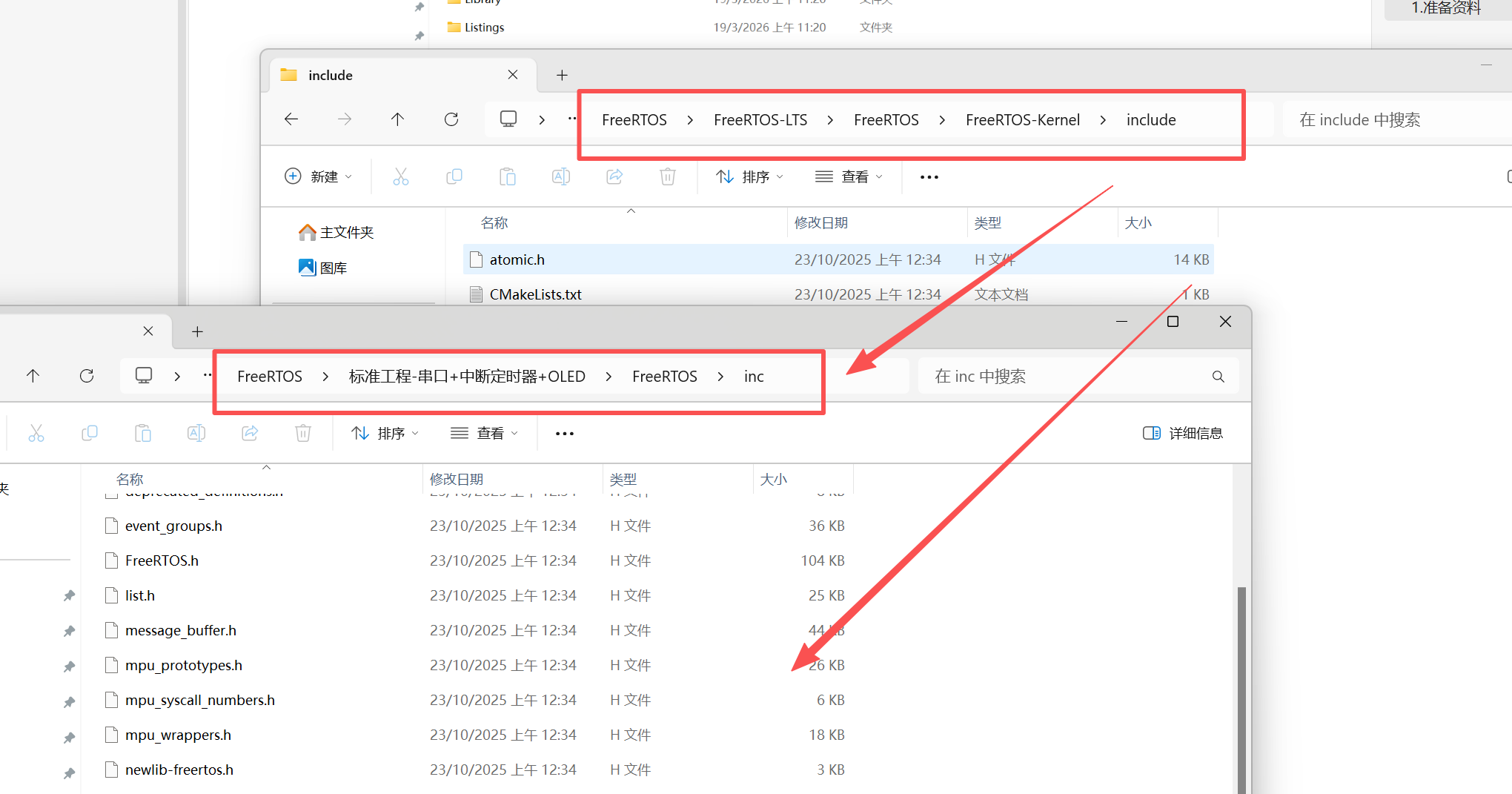
然后,再去到MemMang文件夹,复制到port文件夹下: 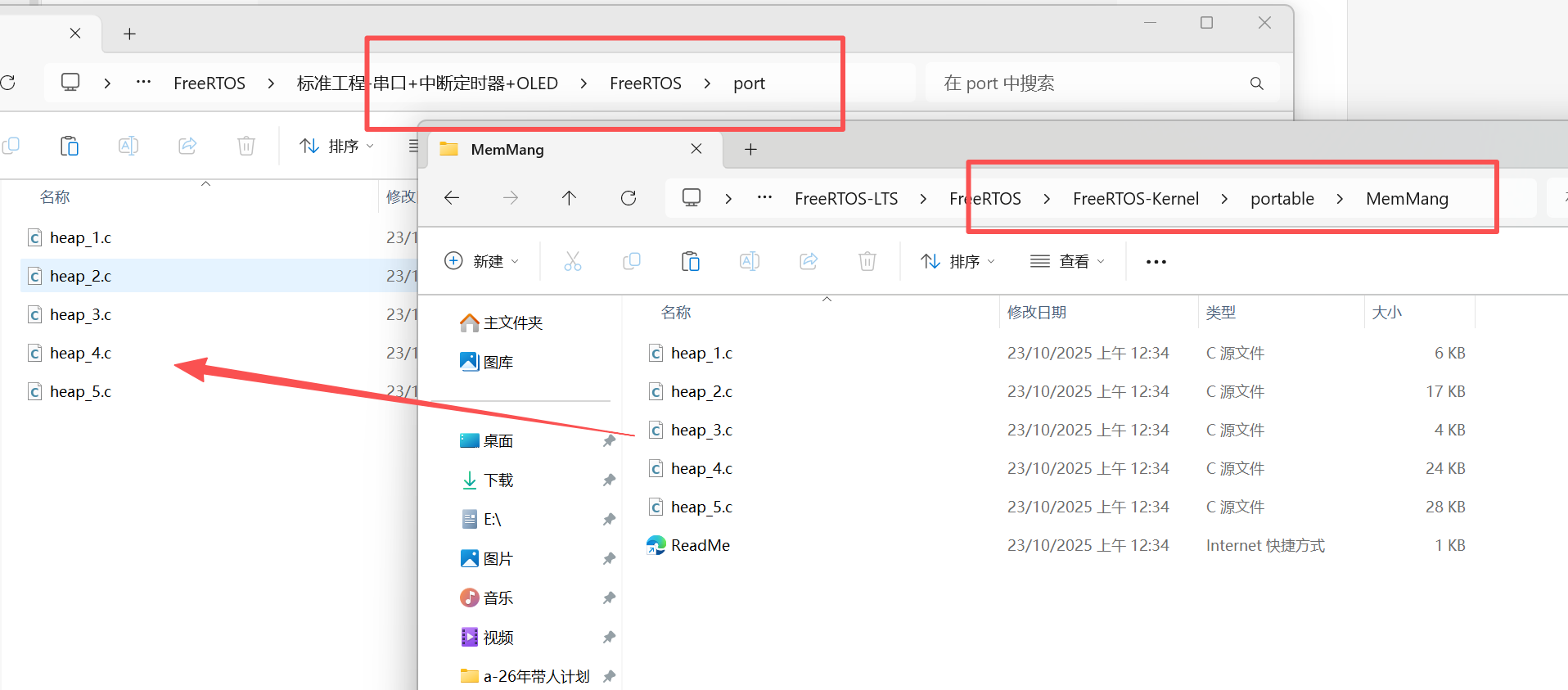
同样的,复制RVDS/ARM_CM3的所有文件到port文件夹: 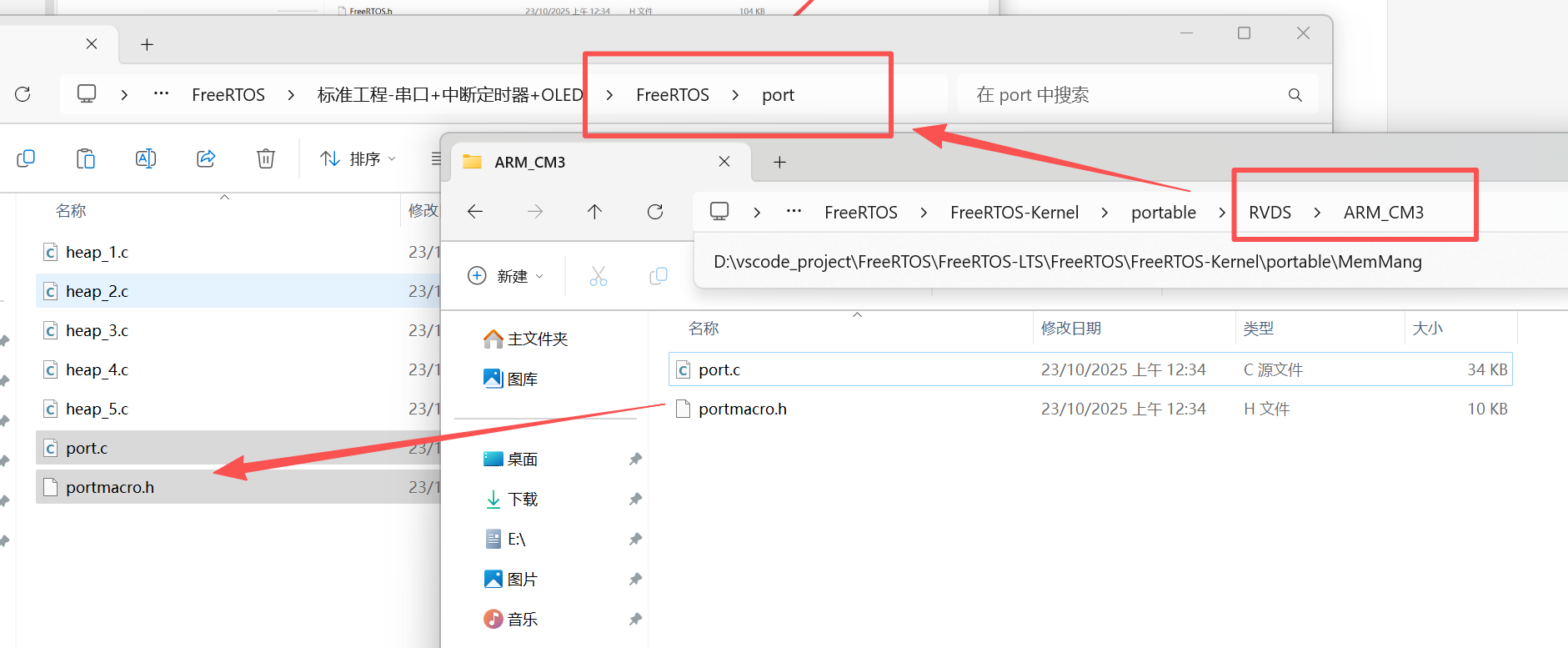
然后,回到FreeRTOS-Kernel文件夹,将当前文件夹下的下面几个文件复制到src文件夹当中: 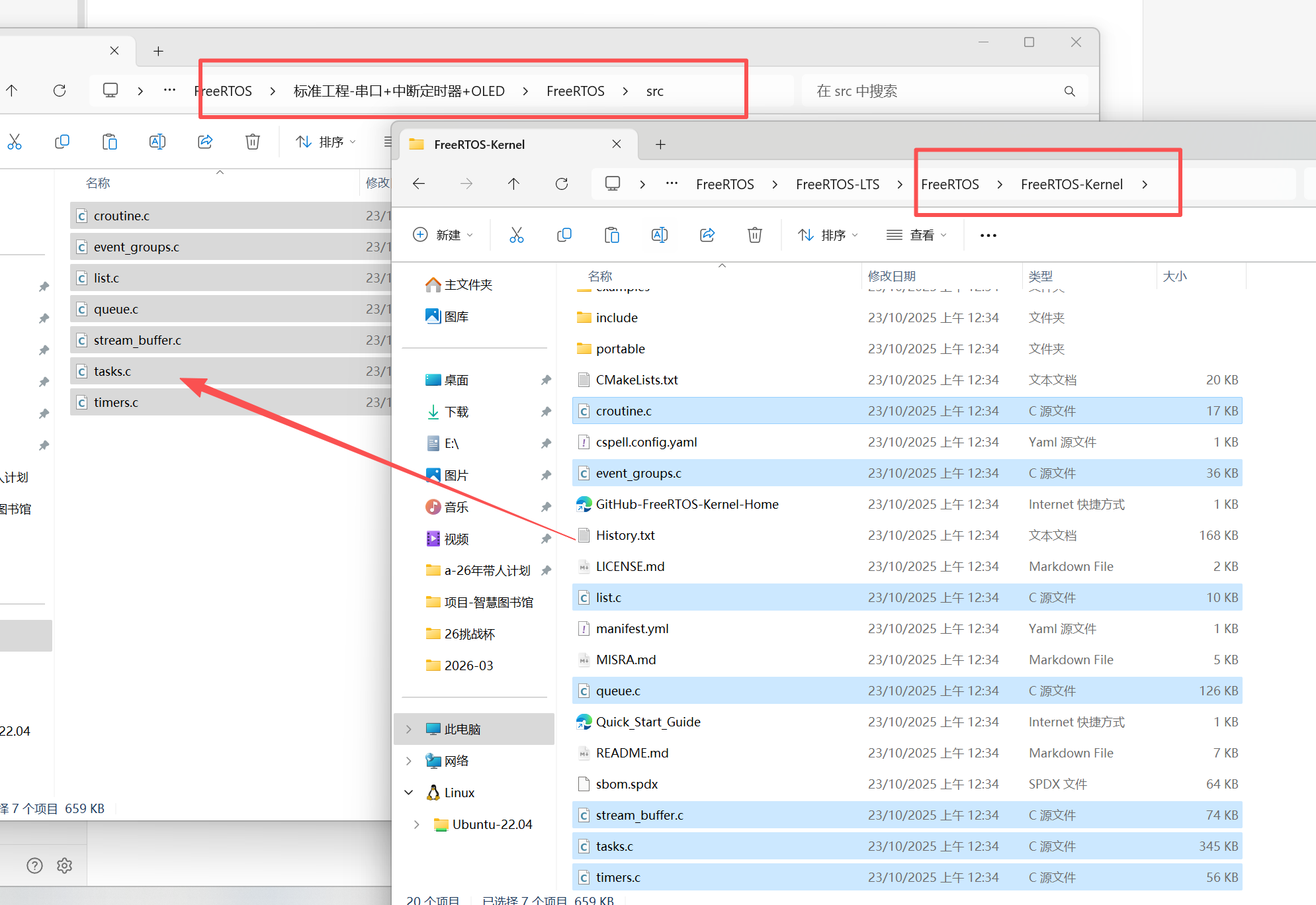
然后,将STM32F103专门配套的config配置文件放到下面的目录下,因为最新版本的FreeRTOS当中并没有附带该文件了,所以这里我们手动创建一个,名称为FreeRTOSConifg.h,内容如下:
/*
* FreeRTOS V202107.00
* Copyright (C) 2020 Amazon.com, Inc. or its affiliates. All Rights Reserved.
*
* Permission is hereby granted, free of charge, to any person obtaining a copy of
* this software and associated documentation files (the "Software"), to deal in
* the Software without restriction, including without limitation the rights to
* use, copy, modify, merge, publish, distribute, sublicense, and/or sell copies of
* the Software, and to permit persons to whom the Software is furnished to do so,
* subject to the following conditions:
*
* The above copyright notice and this permission notice shall be included in all
* copies or substantial portions of the Software.
*
* THE SOFTWARE IS PROVIDED "AS IS", WITHOUT WARRANTY OF ANY KIND, EXPRESS OR
* IMPLIED, INCLUDING BUT NOT LIMITED TO THE WARRANTIES OF MERCHANTABILITY, FITNESS
* FOR A PARTICULAR PURPOSE AND NONINFRINGEMENT. IN NO EVENT SHALL THE AUTHORS OR
* COPYRIGHT HOLDERS BE LIABLE FOR ANY CLAIM, DAMAGES OR OTHER LIABILITY, WHETHER
* IN AN ACTION OF CONTRACT, TORT OR OTHERWISE, ARISING FROM, OUT OF OR IN
* CONNECTION WITH THE SOFTWARE OR THE USE OR OTHER DEALINGS IN THE SOFTWARE.
*
* http://www.FreeRTOS.org
* http://aws.amazon.com/freertos
*
* 1 tab == 4 spaces!
*/
#ifndef FREERTOS_CONFIG_H
#define FREERTOS_CONFIG_H
/*-----------------------------------------------------------
* Application specific definitions.
*
* These definitions should be adjusted for your particular hardware and
* application requirements.
*
* THESE PARAMETERS ARE DESCRIBED WITHIN THE 'CONFIGURATION' SECTION OF THE
* FreeRTOS API DOCUMENTATION AVAILABLE ON THE FreeRTOS.org WEB SITE.
*
* See http://www.freertos.org/a00110.html
*----------------------------------------------------------*/
#define configUSE_PREEMPTION 1
#define configUSE_IDLE_HOOK 0
#define configUSE_TICK_HOOK 0
#define configCPU_CLOCK_HZ ( ( unsigned long ) 72000000 )
#define configTICK_RATE_HZ ( ( TickType_t ) 1000 )
#define configMAX_PRIORITIES ( 5 )
#define configMINIMAL_STACK_SIZE ( ( unsigned short ) 128 )
#define configTOTAL_HEAP_SIZE ( ( size_t ) ( 17 * 1024 ) )
#define configMAX_TASK_NAME_LEN ( 16 )
#define configUSE_TRACE_FACILITY 0
#define configUSE_16_BIT_TICKS 0
#define configIDLE_SHOULD_YIELD 1
/* Co-routine definitions. */
#define configUSE_CO_ROUTINES 0
#define configMAX_CO_ROUTINE_PRIORITIES ( 2 )
/* Set the following definitions to 1 to include the API function, or zero
to exclude the API function. */
#define INCLUDE_vTaskPrioritySet 1
#define INCLUDE_uxTaskPriorityGet 1
#define INCLUDE_vTaskDelete 1
#define INCLUDE_vTaskCleanUpResources 0
#define INCLUDE_vTaskSuspend 1
#define INCLUDE_vTaskDelayUntil 1
#define INCLUDE_vTaskDelay 1
/* This is the raw value as per the Cortex-M3 NVIC. Values can be 255
(lowest) to 0 (1?) (highest). */
#define configKERNEL_INTERRUPT_PRIORITY 255
/* !!!! configMAX_SYSCALL_INTERRUPT_PRIORITY must not be set to zero !!!!
See http://www.FreeRTOS.org/RTOS-Cortex-M3-M4.html. */
#define configMAX_SYSCALL_INTERRUPT_PRIORITY 191 /* equivalent to 0xb0, or priority 11. */
/* This is the value being used as per the ST library which permits 16
priority values, 0 to 15. This must correspond to the
configKERNEL_INTERRUPT_PRIORITY setting. Here 15 corresponds to the lowest
NVIC value of 255. */
#define configLIBRARY_KERNEL_INTERRUPT_PRIORITY 15
#endif /* FREERTOS_CONFIG_H */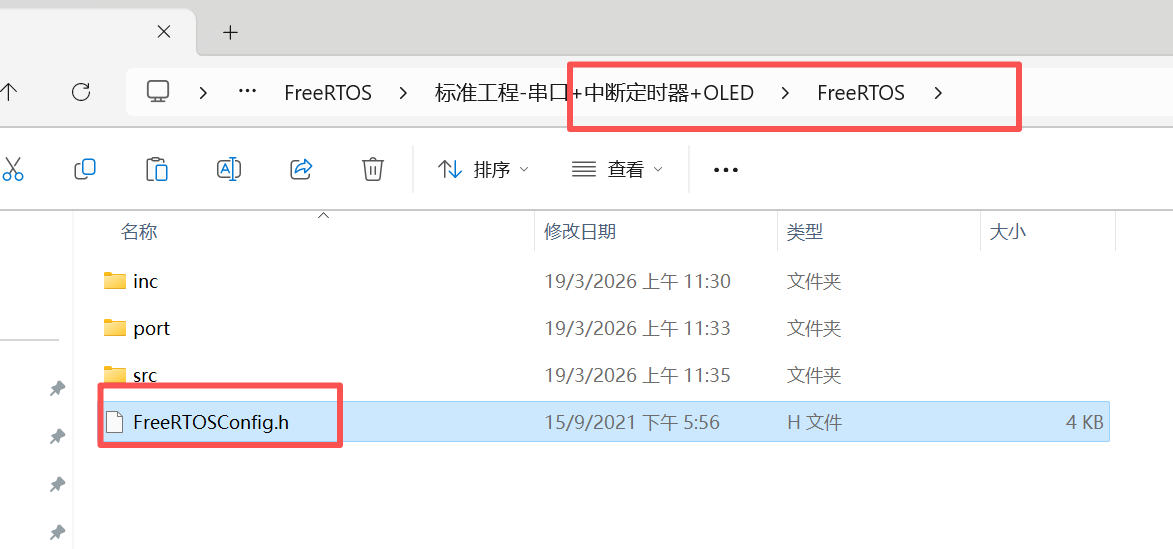
2.工程配置
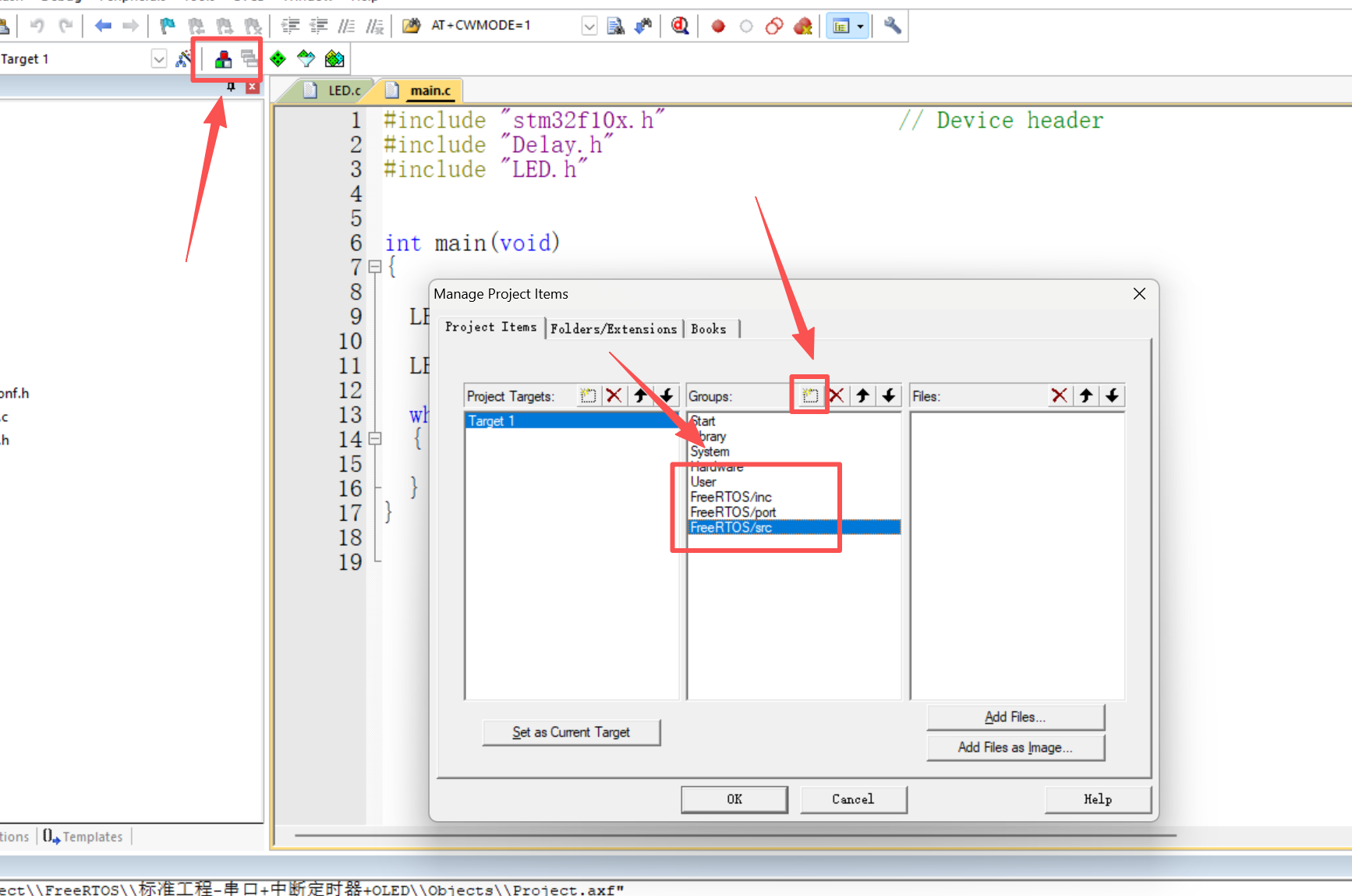
然后,把每个文件夹对应的文件都添加进去,非.c和.h类型的文件可以不需要添加进去 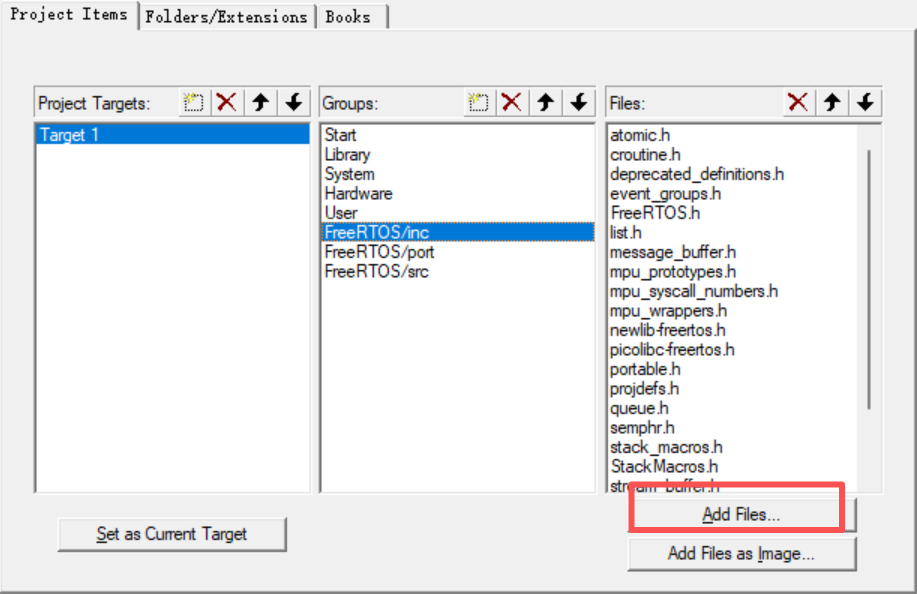
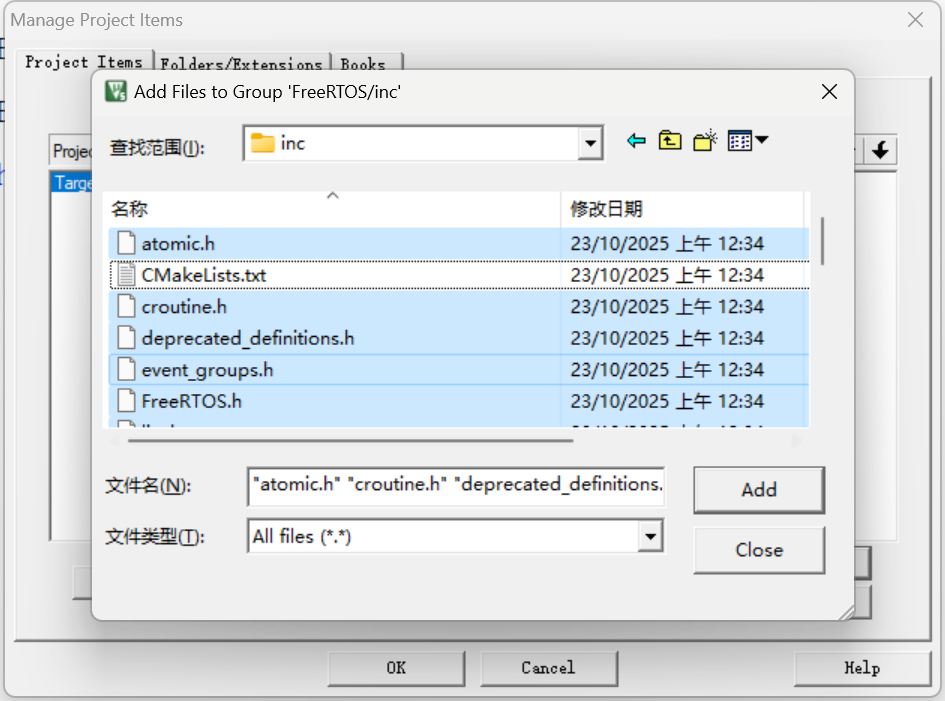
inc、port、src都要添加进去
NOTE
port部分只需要加入heap4和port.c、portmacro.h 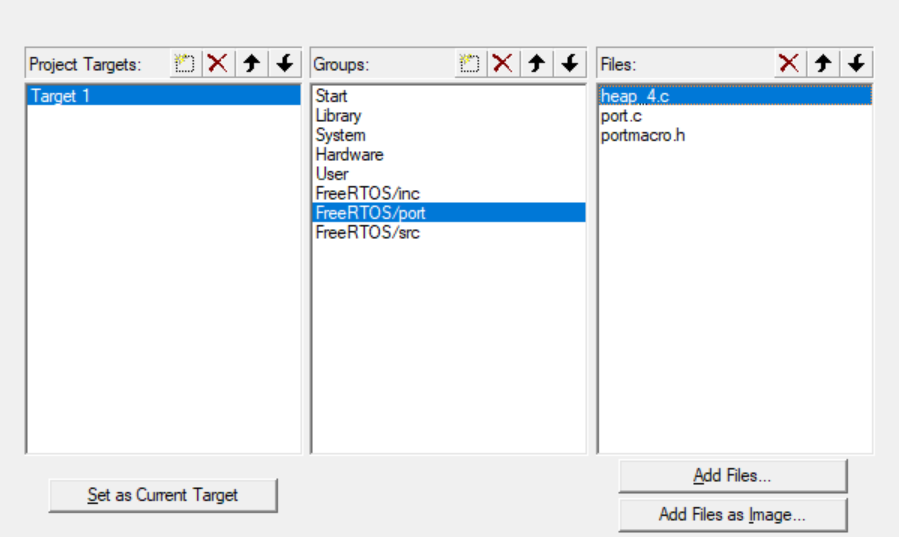
最后,在inc里加入FreeRTOS根目录的config文件: 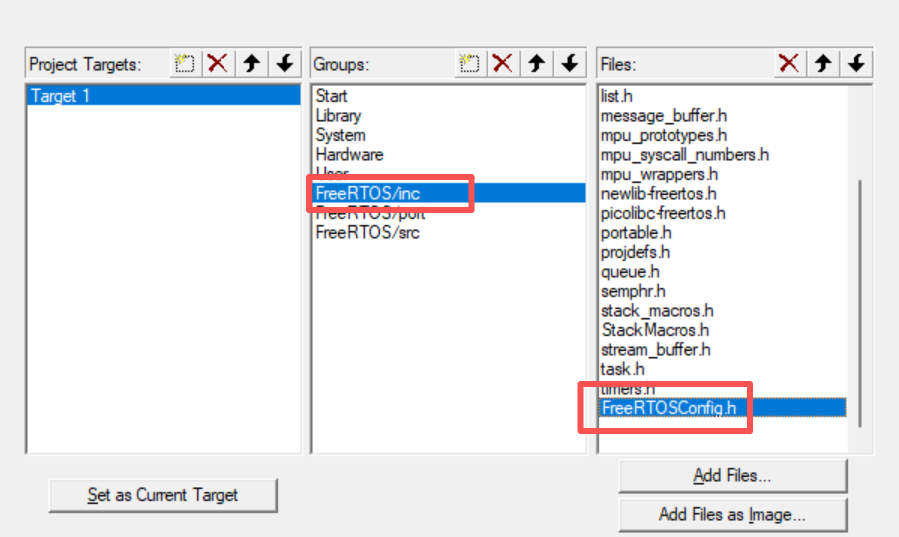
NOTE
插入完以后,可以将该配置文件挪到最前面,以方便修改时快速打开 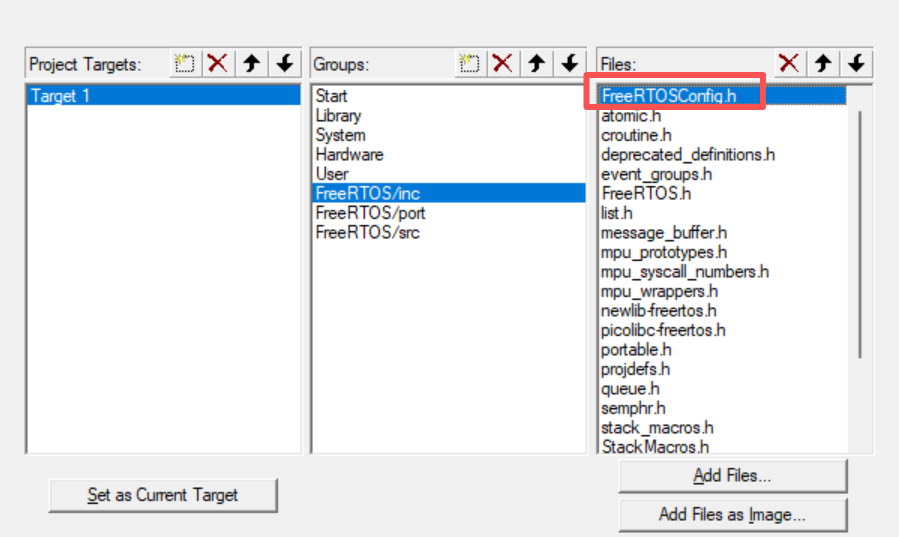
下面,点击魔术棒,将引用目录添加到工程当中,如下图所示: 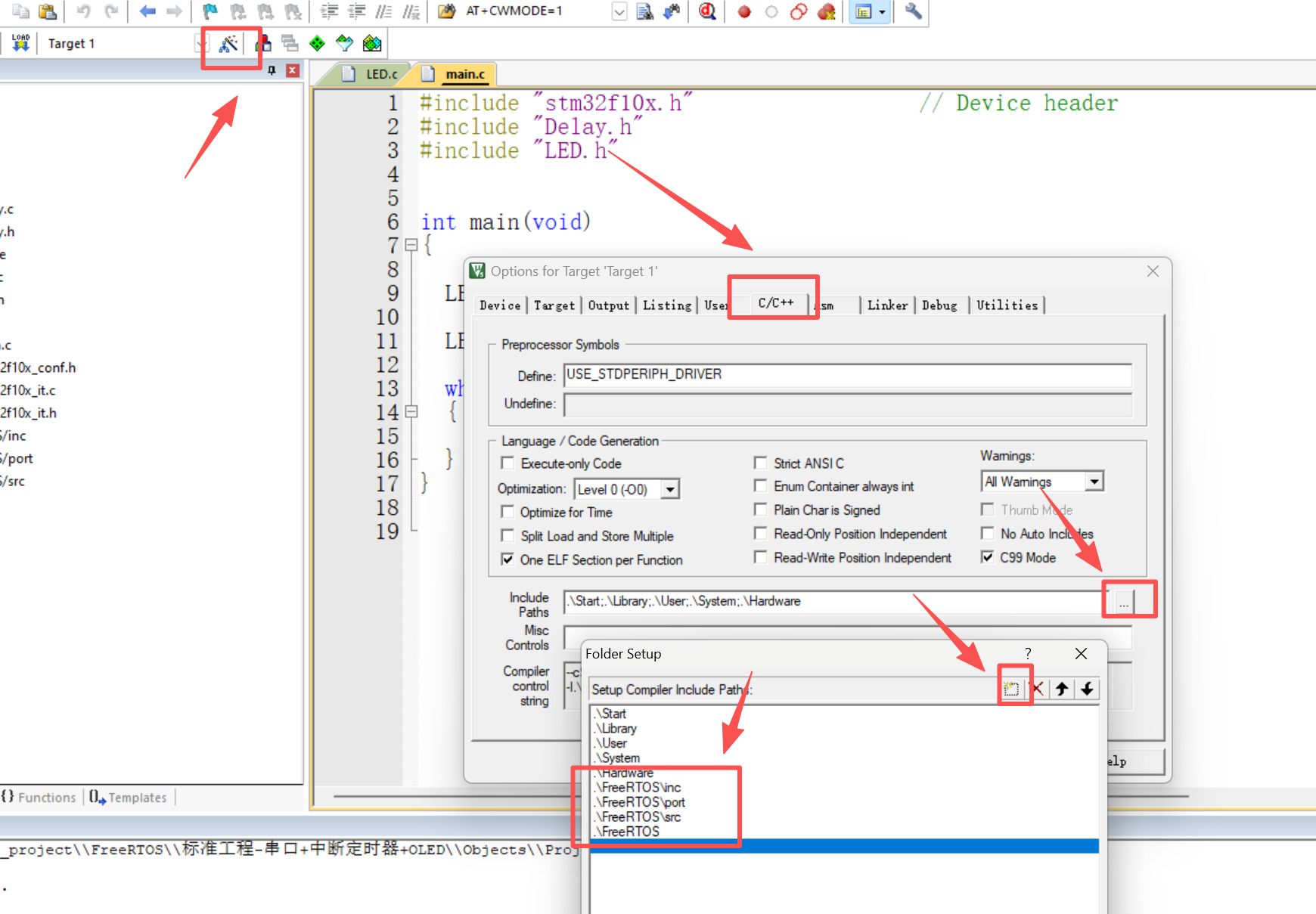
完成以后,点击编译,正常情况的话0错误0警告: 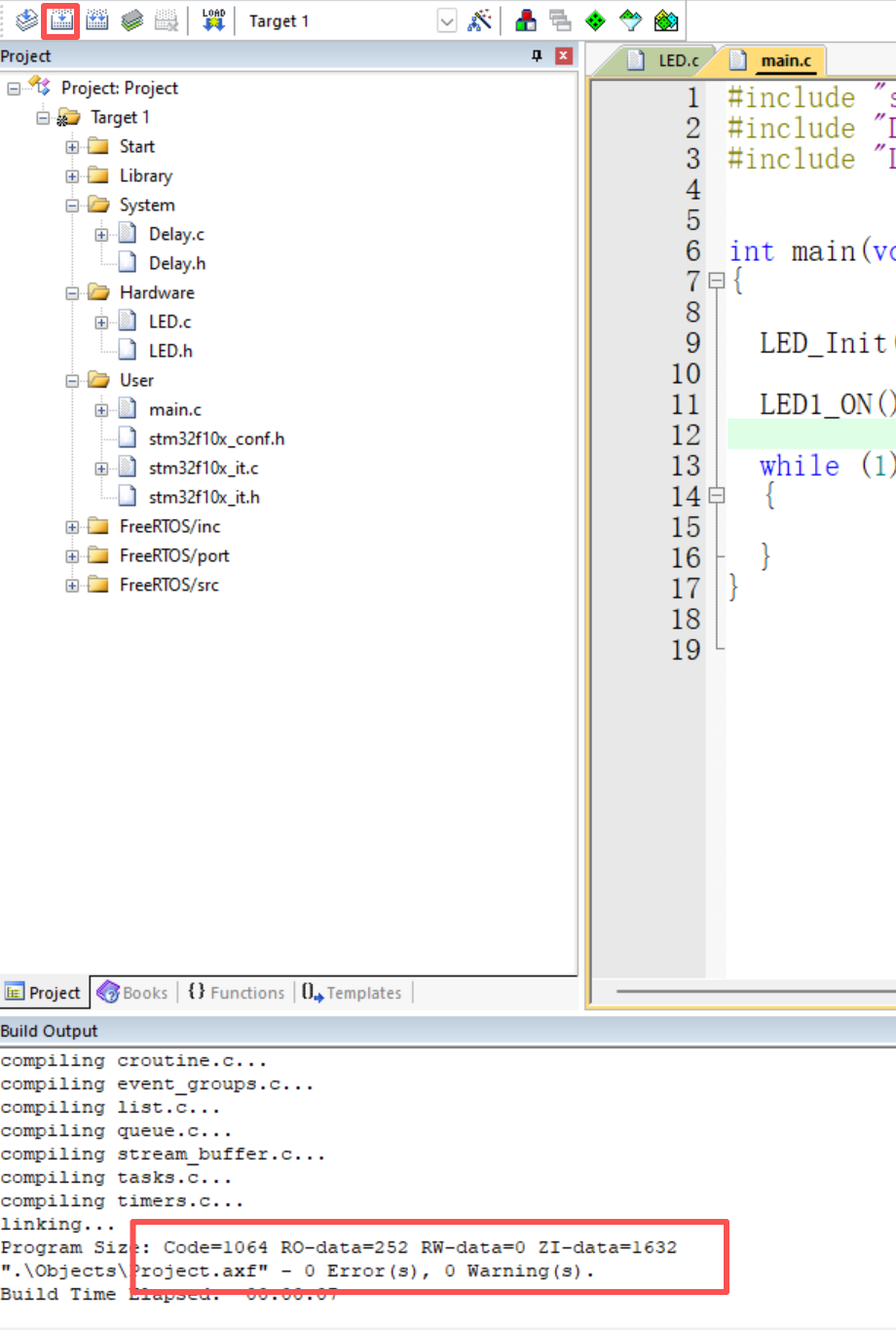
3.修改配置
下面,我们在config文件中添加中断定义: 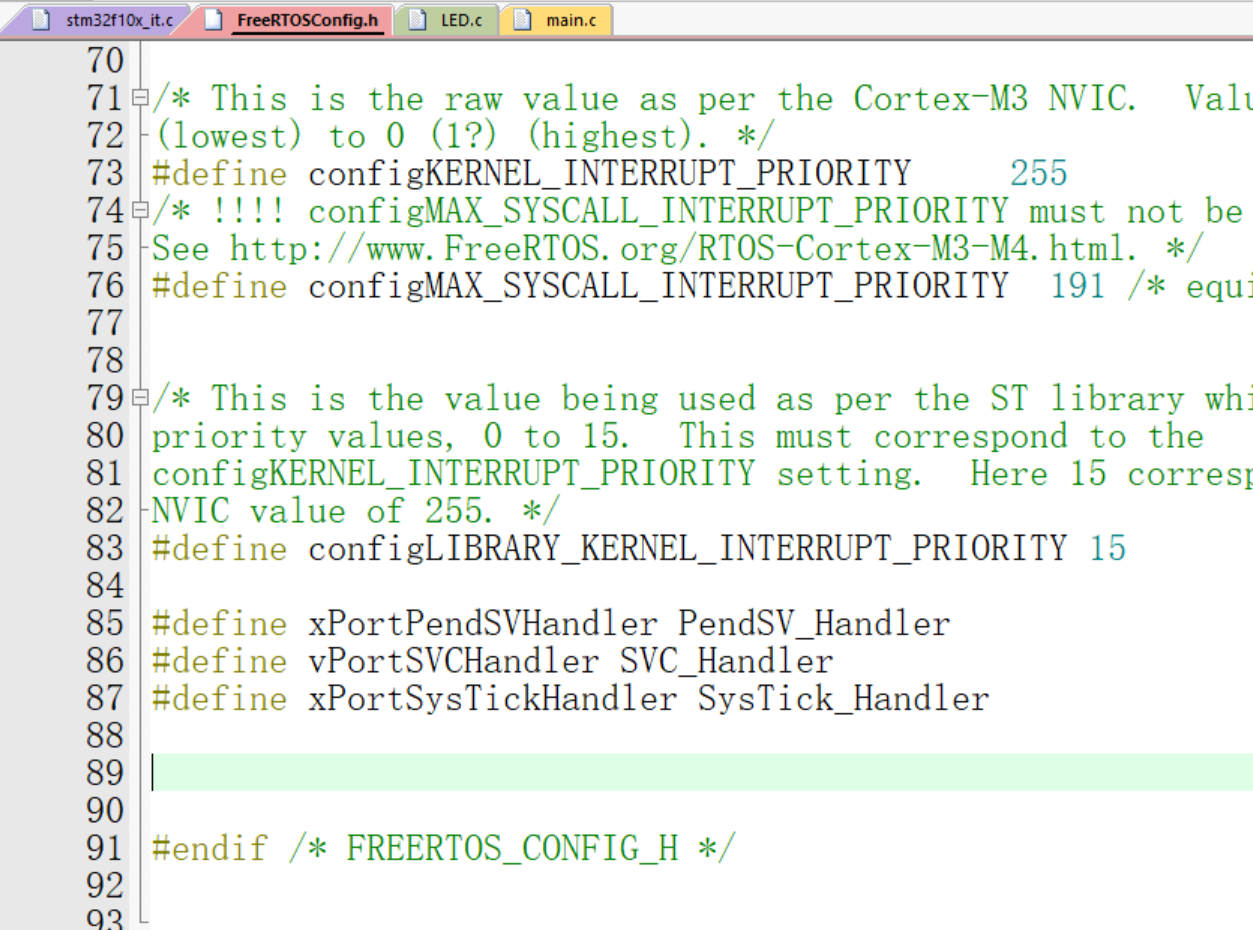
#define xPortPendSVHandler PendSV_Handler
#define vPortSVCHandler SVC_Handler
#define xPortSysTickHandler SysTick_Handler定义完成之后,我们还需要去原本标准库中定义的文件中将其关掉(注释掉) 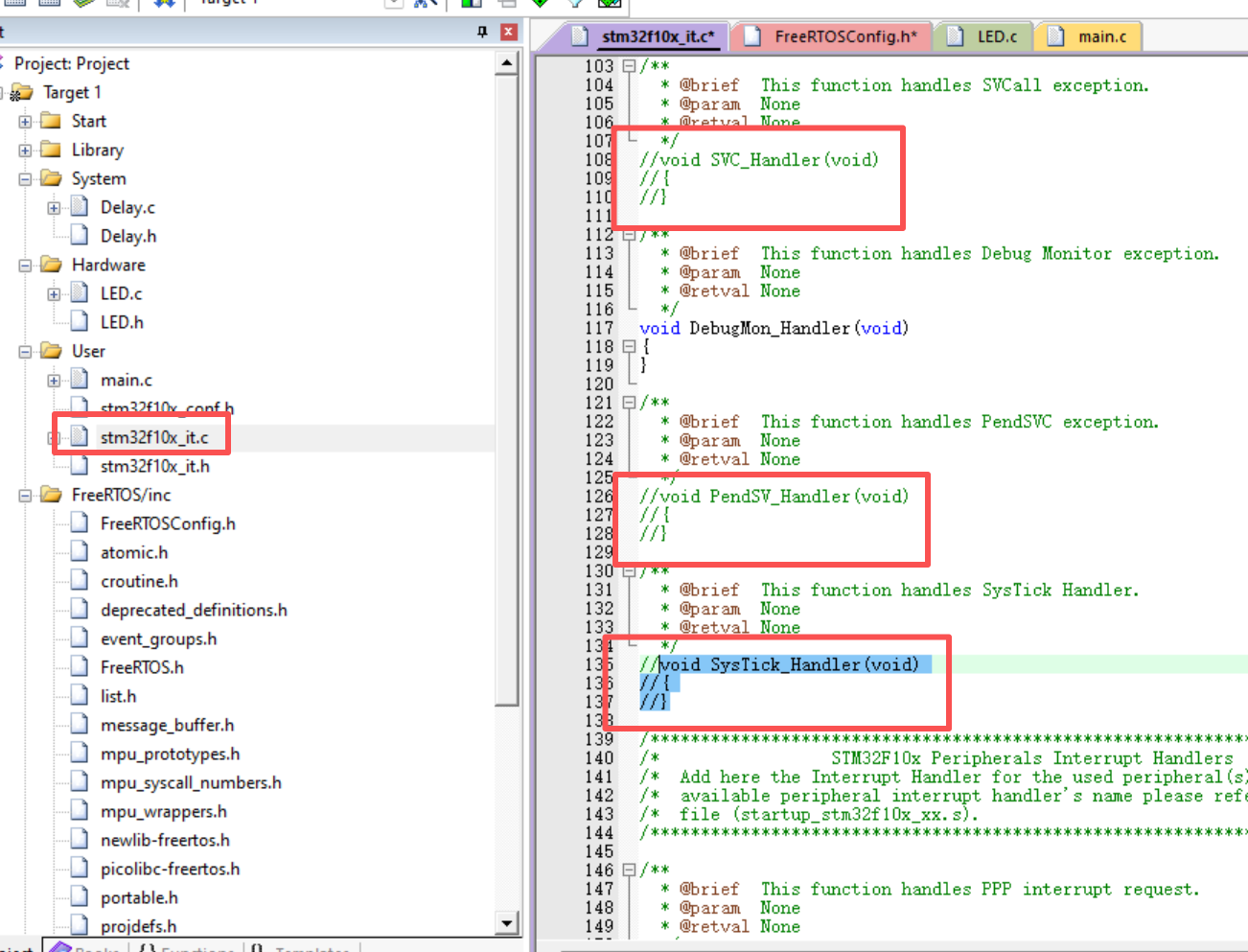
修改完成之后,再次编译,正常情况下是0错误0警告: 
至此,FreeRTOS操作系统移植完成。
4.测试验证
这里,我们编写一个测试的代码来进行功能验证:
#include "stm32f10x.h" // Device header
#include "Delay.h"
#include "LED.h"
#include "FreeRTOS.h" //导入FreeRTOS内核头文件
#include "Task.h" //导入Task头文件
TaskHandle_t myTaskHandler; //创建一个Task任务句柄
//任务函数
void myTask(void *arg)
{
while(1)
{
LED1_Turn();
vTaskDelay(500);
}
}
int main(void)
{
LED_Init();
// LED1_ON();
xTaskCreate(myTask,"myTask",128,NULL,2,&myTaskHandler);
vTaskStartScheduler();
while (1)
{
}
}1.硬件直接烧录验证
编译烧录验证,如果观察到小灯每隔500毫秒闪烁一次,则说明FreeRTOS已经成功跑通。 
2.软件仿真验证
相关配置如下: 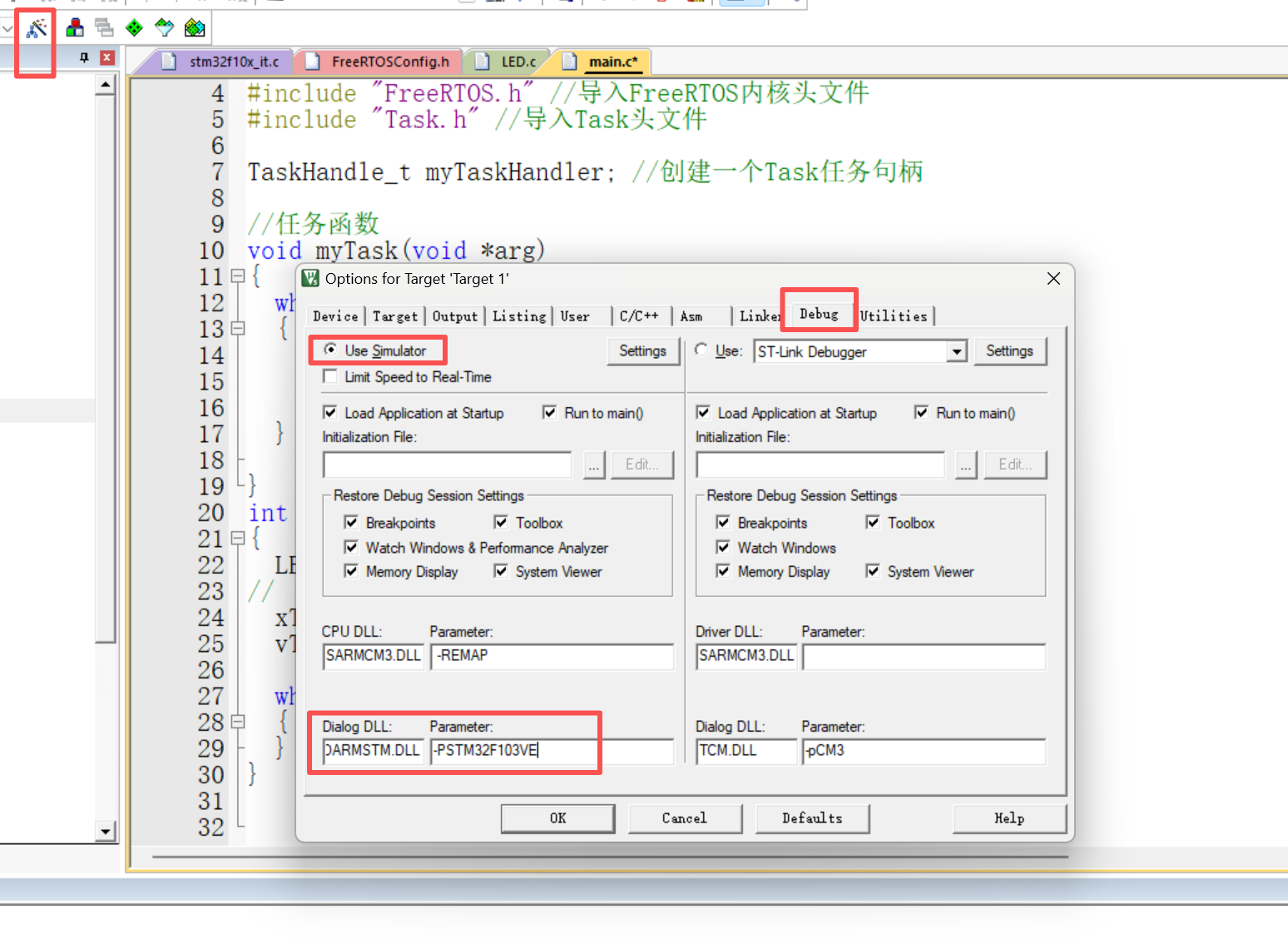
然后点击仿真 
打开逻辑分析仪窗口: 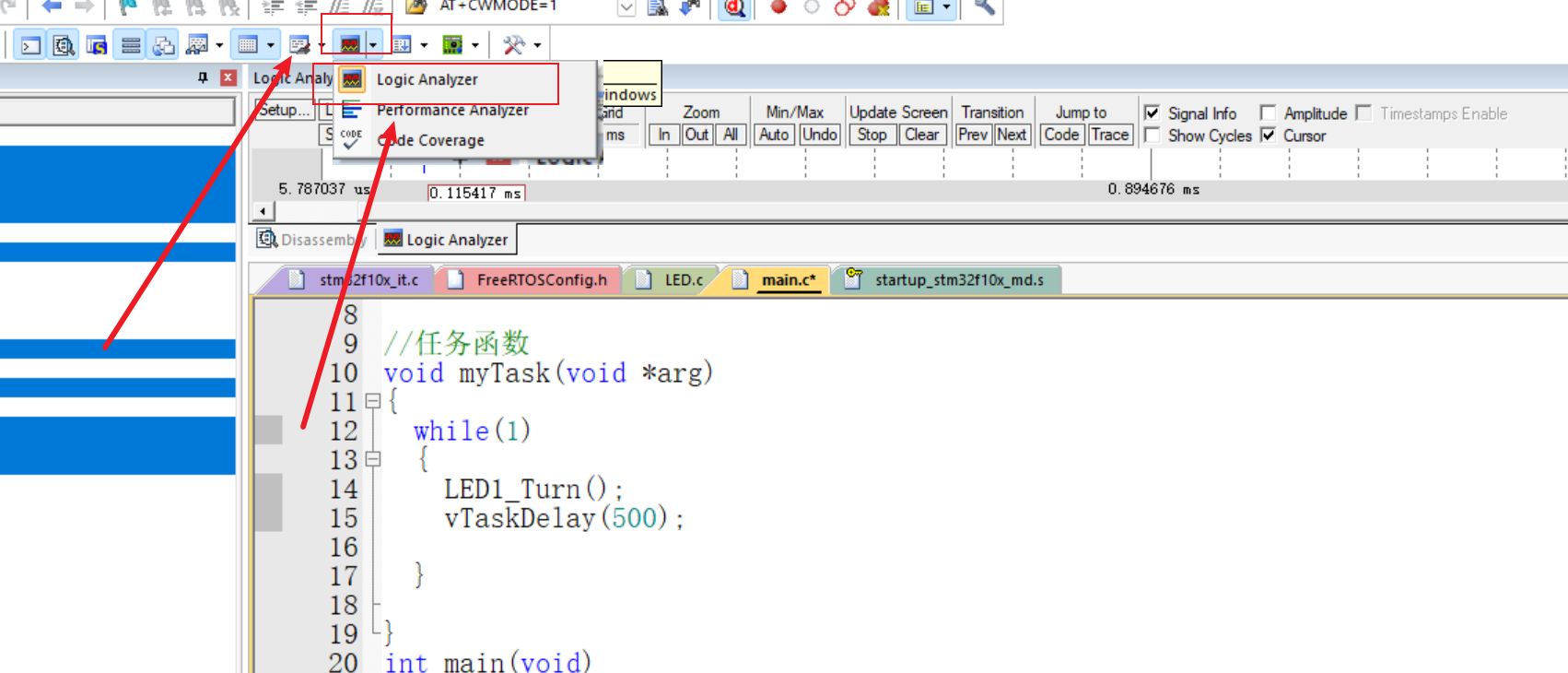 添加PB1作为逻辑信号
添加PB1作为逻辑信号 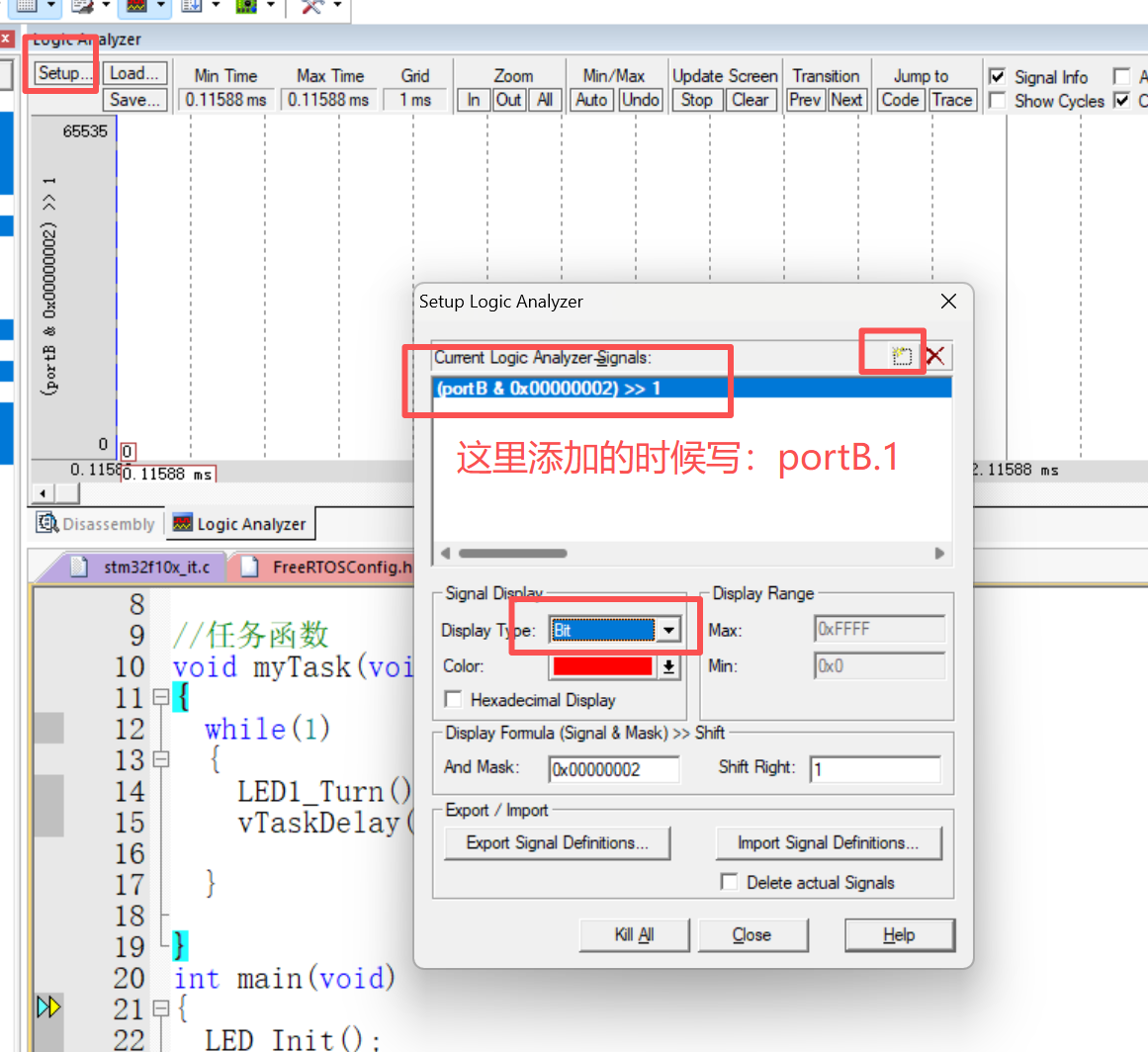
完成之后,点击Close
随后,点击全速运行: 
这样,就可以在逻辑分析仪上看到电平信号了: 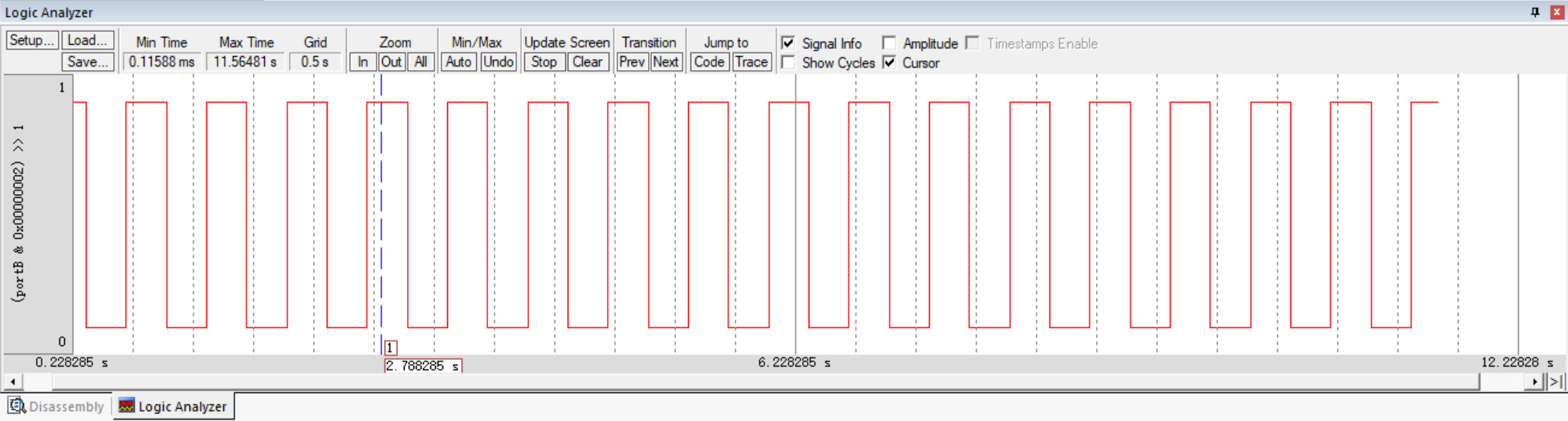
可以看到电平每隔500ms跳变一次,说明FreeRTOS任务运行正常,移植没问题。