校园智巡 — 近一周进度汇报
汇报时间:2026 年 6 月 16 日 覆盖周期:2026.06.03 — 2026.06.16
一、本周完成工作
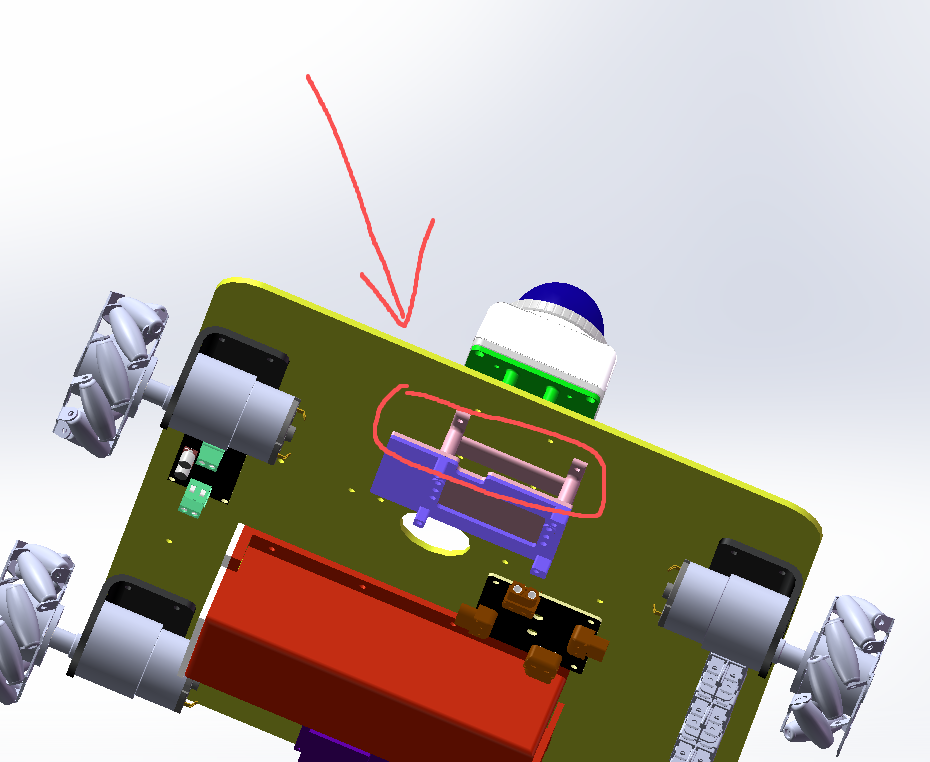
1. 新增「ROS 下层板连接件」3D 打印件(散热隔离)
问题背景:原结构将 Livox Mid-360 雷达与 ROS 下层控制板贴合放置。Mid-360 工作时发热量大,热量直接传导至下层板,触发其高温温控保护,导致下层板停止工作、小车失控。
解决方案:设计并 3D 打印了一个连接件,将 Mid-360 与下层板在结构上隔开,使两者不再直接接触,切断了热传导路径。
成果:下层板不再因雷达发热而触发温控,运行稳定性问题得到根本解决。
2. ROS 上层与下层控制对齐
本周打通了上层 ROS 与下层控制板之间的控制一致性,为后续 Nav2 精确控制打基础。
- (1)下层板运动方向与编码器对齐:修改下层板代码与接线,校正小车前 / 后 / 左 / 右的运动方向顺序,使编码器测值正确、与实际运动一致。
- (2)里程计参数标定:修正小车的轮距、轮轴等机械参数,使上层 ROS 里程计输出与真实运动对齐,保证后续 Nav2 控制中位姿估计准确。
3. 实车测试
完成首轮整车联调测试,结果如下:
| 测试项 | 结果 |
|---|---|
| 小车与 Web 网页端连接 | ✅ 基本连通 |
| 手动遥控控制 | ✅ 正常 |
| map 地图定位 | ⚠️ 严重漂移,初步推测为 EKF 卡尔曼滤波融合环节存在问题(待进一步确诊) |
说明:map 漂移的具体根因(EKF 调参 / 传感器外参 / IMU 质量 / TF 对齐 / RTK 原始数据)尚未定位,下周将优先排查,详见第二节技术路线讨论。
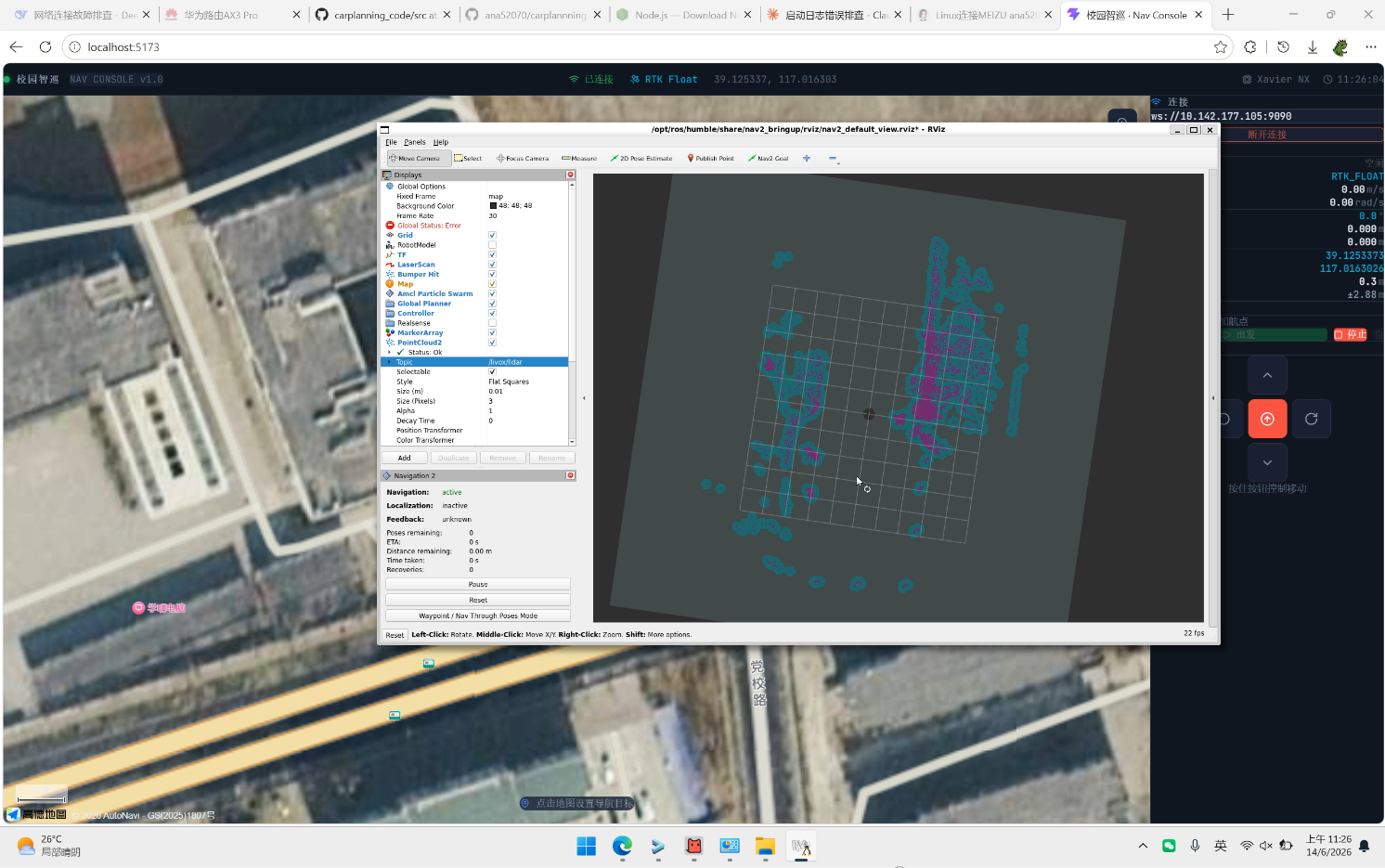
==见:演示视频1:实车测试==
4. 技术路线调研:引入开源项目 DDDMR
针对当前「手动魔改 Nav2 + EKF + RTK + 3D LiDAR」方案在 3D 感知与规划上的局限,本周调研并初步试用了开源 3D 导航项目 DDDMR(3D Mobile Robot Navigation)。
- 开源项目地址:https://github.com/dfl-rlab/dddmr_navigation
- 进展:搭建完成 DDDMR 仿真环境,成功跑起四足机器狗仿真 demo,但仍存在部分问题,后续继续完善与排查。
- 关于是否切换到该方案,详见第二节专门讨论。
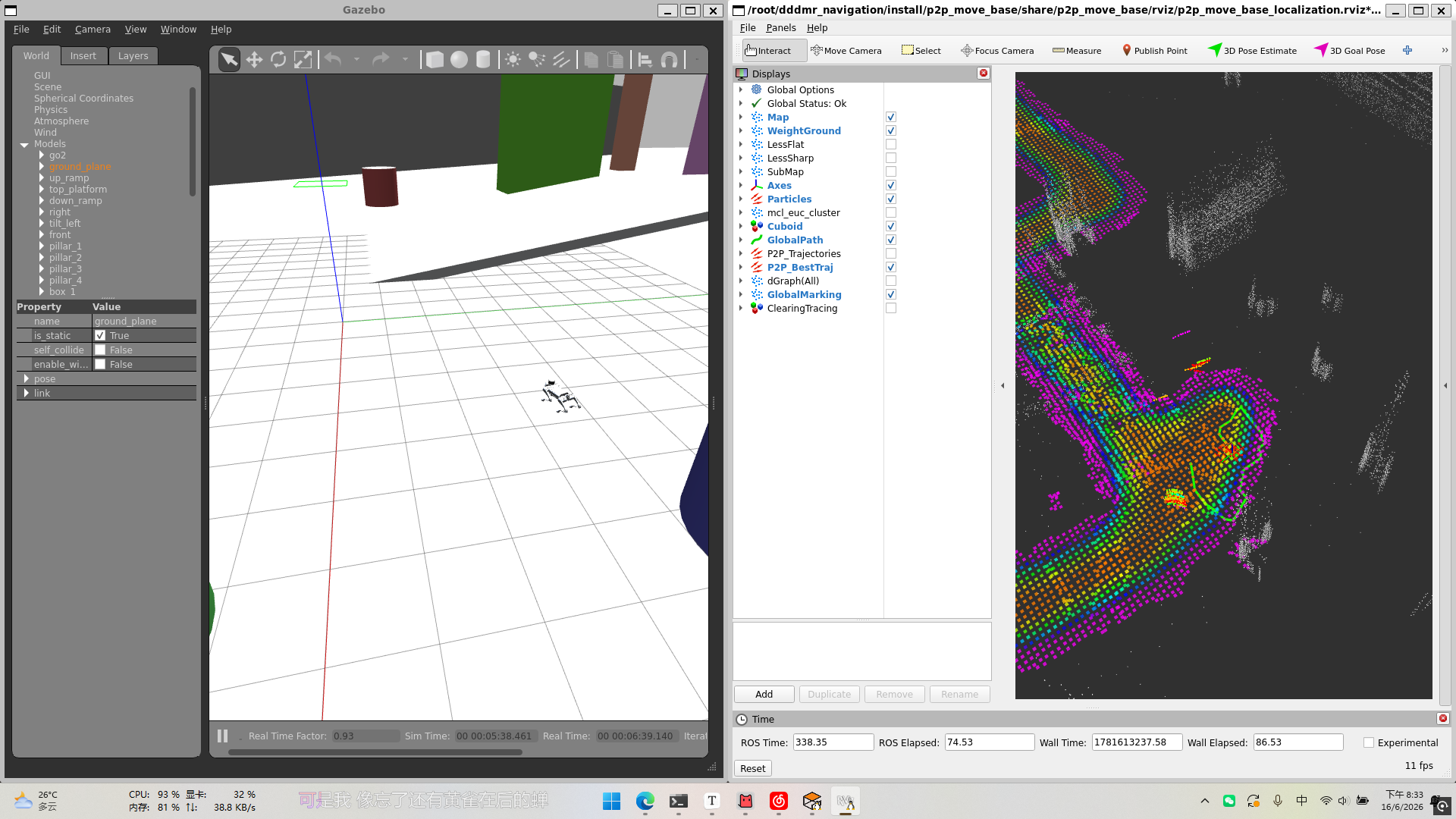
==见:演示视频2:DDDMR仿真测试==
5. 购置深度相机
采购了一台深度相机,计划用于加强 3D 感知 / 视觉方向的突破,可与 DDDMR 的感知 / 语义分割模块(集成 YOLO11)配合使用。
目前已经发货

6. Web 端优化==(王帅)==
- 优化 Nav Console 上位机 UI。

新增楼块图(建筑物轮廓图层),提升地图可读性与定位参考。

新增按键“纯净UI”点击后可显示纯净板视图并且找到小车当前位置。新增功能,整理右侧功能区块,可点击隐藏。
==见:演示视频3:web优化==
二、技术路线讨论:是否引入 DDDMR
本周对「是否将主线从魔改 Nav2 切换到 DDDMR」进行了较深入的讨论与论证。以下记录推演历程,供老师参考决策。
2.1 起因:现方案的核心痛点
现方案使用 Nav2,需将 Mid-360 的 3D 点云降维投影为 2D 激光扫描再喂给导航栈。这一步是有损的——障碍感知被压扁到平面,台阶、低矮障碍、立体结构信息丢失;且实车测试出现 map 严重漂移。当前方案的数据流与两处痛点如下图所示:

由此产生了引入原生 3D 导航框架 DDDMR 的想法。
2.2 对 DDDMR 的认识:它与本项目的范式冲突
调研后发现,DDDMR 与本项目当前定位在设计哲学上是相反的:
| 维度 | 本项目现方案 | DDDMR 原生 |
|---|---|---|
| 地图 | 无需预先建图 | 必须先用 LEGO-LOAM 建好 3D 点云地图 |
| 定位 | RTK 厘米级全局定位 | MCL 3D 点云匹配(蒙特卡洛定位) |
| 设计目标场景 | 室外开阔、卫星可见 | GPS-denied(无卫星)、室内多层 / 坡道 / 立体结构 |
也就是说,DDDMR 的定位不依赖 GPS,而是依赖「在预建 3D 地图中做点云匹配」。
2.3 关键风险:MCL 在本项目室外场景可能是短板
DDDMR 的 MCL 定位需要环境有足够几何特征来对齐点云。而本项目场景是校园室外开阔硬化路面——点云稀疏、特征少,MCL 容易无法收敛或漂移;这恰恰是 RTK 最擅长、最该使用的场景。因此「直接用 DDDMR 的 MCL 取代 RTK」在本项目场景下风险较高。
2.4 核心洞察:定位层本质上只是产出一个 TF
进一步分析发现:导航栈中「定位」这一层,本质上只是产出一个 map → base_link 的坐标变换(机器人在地图中的位姿)。下游的 3D 规划器不关心这个位姿来自 MCL 还是 RTK,只要能稳定提供即可。
这意味着:可以把 DDDMR 的 MCL 模块摘掉,用 RTK 来产出这个 TF,从而既拿到 DDDMR 的原生 3D 规划能力,又规避 MCL 在开阔地的弱点、保留本项目 RTK 的核心优势。
2.5 明确诉求:要的是「规划层」的 3D,而不仅是「感知层」
讨论中厘清了一点——所谓「想要 3D」其实是两件事:
- 3D 感知 / 局部避障:障碍物不再被压扁(这部分其实在现有 Nav2 上用
spatio_temporal_voxel_layer体素层也能解决); - 3D 全局路径规划:在三维空间结构中规划路径(上下坡、立体场景)。
本项目的真实诉求是后者——三维空间的路径规划。而 DDDMR 的 3D 全局规划器是在预建 3D 点云地图上规划的,因此「预先建一张 3D 地图」这一步无法绕开。
三、两个候选方案(待定夺)
基于上述讨论,整理出两条可行路线,各有取舍,请老师定夺。两方案的「建图层」与「规划层」完全相同,唯一差异在定位层(MCL ↔ RTK),如下图所示:

方案一:全面采用 DDDMR 原生路线
LEGO-LOAM 3D 建图 → MCL 3D 点云定位 → DDDMR 3D 全局 + 局部规划- 优点:框架原生闭环,改动最小;直接获得完整 3D 导航与多层 / 坡道 / 立体结构能力;可充分利用新购深度相机做语义感知。
- 代价 / 风险:
- 放弃「无图 + RTK」定位,项目核心定位需重写;
- MCL 在校园室外开阔路面特征稀疏,存在定位不收敛 / 漂移风险(RTK 本擅长的场景反被舍弃);
- DDDMR 为小型实验室研究项目,社区与文档相对薄弱,调试成本较高。
方案二:DDDMR 3D 建图与规划 + RTK 替换 MCL 定位(混合魔改)
预先用 LEGO-LOAM 建一张与 RTK 坐标对齐的 3D 地图(一次性)
→ RTK 产出 map→base_link(替代 MCL)
→ DDDMR 3D 全局 + 局部规划- 核心思想:定位层只是产出 TF,由 RTK 来产出即可;以此绕开 MCL 在开阔地的弱点,同时保留本项目 RTK 厘米级定位的护城河,并获得真正的 3D 规划能力。
- 优点:
- 保留 RTK 全局定位优势,室外稳健;
- 满足「三维空间路径规划」的核心诉求;
- 仍可复用深度相机与 3D 感知。
- 代价 / 风险:
- 不再是「无图」,定位变为「预建 3D 地图 + RTK 定位 + 3D 规划」(属户外自动驾驶常见架构,但项目定位表述需调整);
- 需将 DDDMR 的 MCL 模块摘除、自行编写 RTK→map 节点,并保证预建 3D 地图坐标系与 RTK 世界坐标对齐(地图配准 / georeferencing),集成有一定工作量。
共同前提:无论选择哪条路线,当前 map 漂移的根因排查都需优先完成——若漂移源于外参 / IMU / TF / RTK 原始数据,问题会同样带入新方案,需先确诊。
四、当前系统整体状态
| 子系统 | 状态 |
|---|---|
| 硬件平台(Xavier NX + Docker ROS2 Humble) | ✅ 就绪 |
| UM982 RTK GPS 驱动 | ✅ 已部署 |
| Livox Mid-360 LiDAR 驱动 | ✅ 已部署 |
| Mid-360 / 下层板散热隔离 | ✅ 已加 3D 打印连接件解决 |
| 上下层控制对齐(方向 / 编码器 / 里程计参数) | ✅ 已对齐 |
| Web 网页端连接与手动控制 | ✅ 实车验证通过 |
| Nav Console Web 控制台(UI + 楼块图) | ✅ 已优化 |
| 深度相机 | ✅ 已购置,待接入 |
| map 定位(EKF 融合) | ⚠️ 实车严重漂移,根因待确诊 |
| 主线导航技术路线 | 🔧 在「魔改 Nav2」与「DDDMR + RTK」之间评估 |
| DDDMR 仿真环境 | 🔧 demo 已跑通,存在问题待排查 |
五、下一步计划
- 确诊 map 漂移根因:逐层排查 RTK 原始数据抖动、IMU 静止噪声、Mid-360→IMU 外参、TF 对齐与 EKF 协方差,定位是融合问题还是传感器 / 标定问题(无论是否换方案都需完成)。
- 推进技术路线决策:与老师确认方案一 / 方案二取向;优先验证 DDDMR 在真实室外开阔场地的定位与规划可行性,作为去 / 留的判定依据。
- 继续排查 DDDMR 仿真问题,完善四足 demo,并尝试切换为差速底盘模型。
- 深度相机接入:完成驱动与话题验证,为 3D 感知 / 语义避障做准备。
文档生成时间:2026-06-16