ROS2串口通信-连接STM32等下位机/串口模块调用
前言
阅读此博客需要有基础的ROS2知识,再次不做讲解。
开启开发板串口
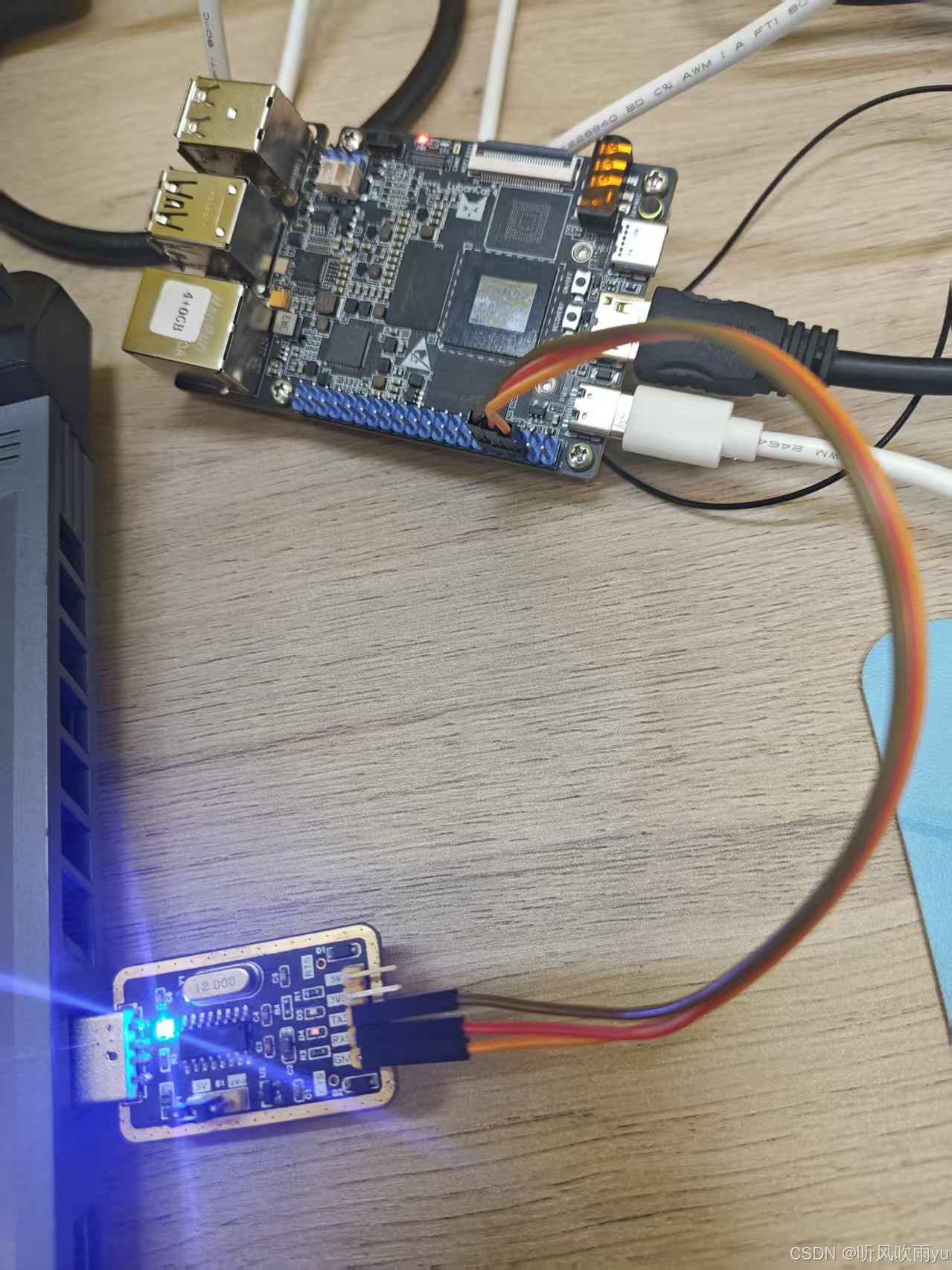
由于每个开发板的串口开启方式都不一样,这里不做过多讲解,根据自己的开发板寻找教程开启串口即可。我这里使用的是鲁班猫4的开发板,这里分享一下鲁班猫4的串口开启教程: 6. 串口通讯 — 快速使用手册—基于LubanCat-RK3588系列板卡 文档
测试串口通讯
将下面的测试代码保存至开发板并运行:
import serial
import time
def serial_communication():
ser = None
try:
# 配置串口参数
ser = serial.Serial(
port='/dev/ttyS0', # 根据系统修改串口设备
baudrate=115200, # 波特率
bytesize=serial.EIGHTBITS,# 数据位
parity=serial.PARITY_NONE,# 校验位
stopbits=serial.STOPBITS_ONE, # 停止位
timeout=1 # 读取超时时间
)
if ser.is_open:
print(f"成功打开串口: {ser.port}")
try:
while True:
# 检查接收缓冲区是否有数据
if ser.in_waiting > 0:
# 读取所有可用数据
received_data = ser.read(ser.in_waiting)
# 打印原始字节数据和解码后的文本
print(f"接收到原始数据: {received_data}")
try:
decoded_data = received_data.decode('utf-8').strip()
print(f"解码后文本: {decoded_data}")
except UnicodeDecodeError:
print("接收到非文本数据")
# 将接收到的数据原样返回
ser.write(received_data)
print("已回传数据")
# 短暂休眠降低CPU占用
time.sleep(0.01)
except KeyboardInterrupt:
print("\n用户中断,关闭串口")
except serial.SerialException as e:
print(f"串口通信错误: {e}")
finally:
if ser.is_open:
ser.close()
print("串口已关闭")
else:
print("无法打开串口")
except serial.SerialException as e:
print(f"串口操作失败: {e}")
except Exception as e:
print(f"发生未知错误: {e}")
if __name__ == "__main__":
serial_communication()
注意需要先将USB转串口连接开发板和电脑,具体连接引脚根据开发板而定。
然后运行该代码,运行命令为:
python3 代码路径
例如我的为:
python3 mypython/python_code/serial_test.py
如果遇到提示serial未安装的报错,

则可以安装一下: 当然还是建议创建一个虚拟环境来安装
pip install pyserial

此时再次执行该python脚本

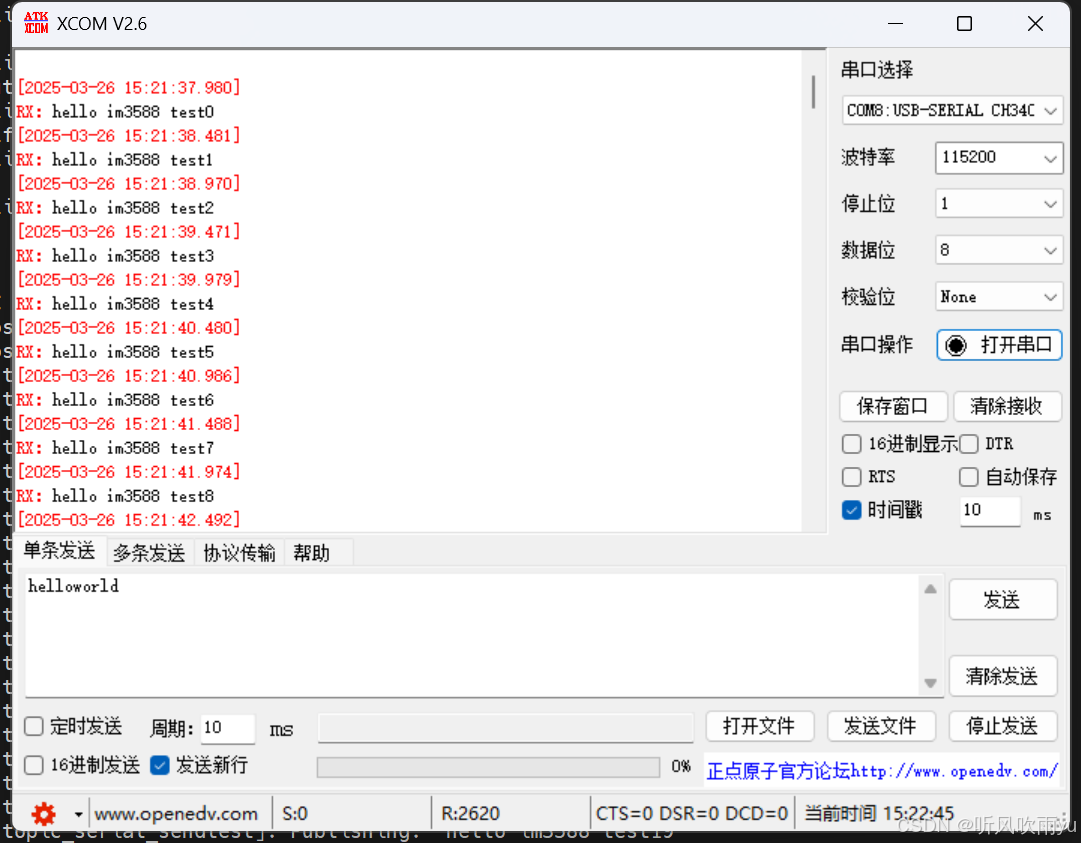
此时,我们打开对应的串口助手:
串口的配置如截图,当然如果需要更改可到代码中进行修改。
现在我们给开发板发送一个helloworld进行测试:
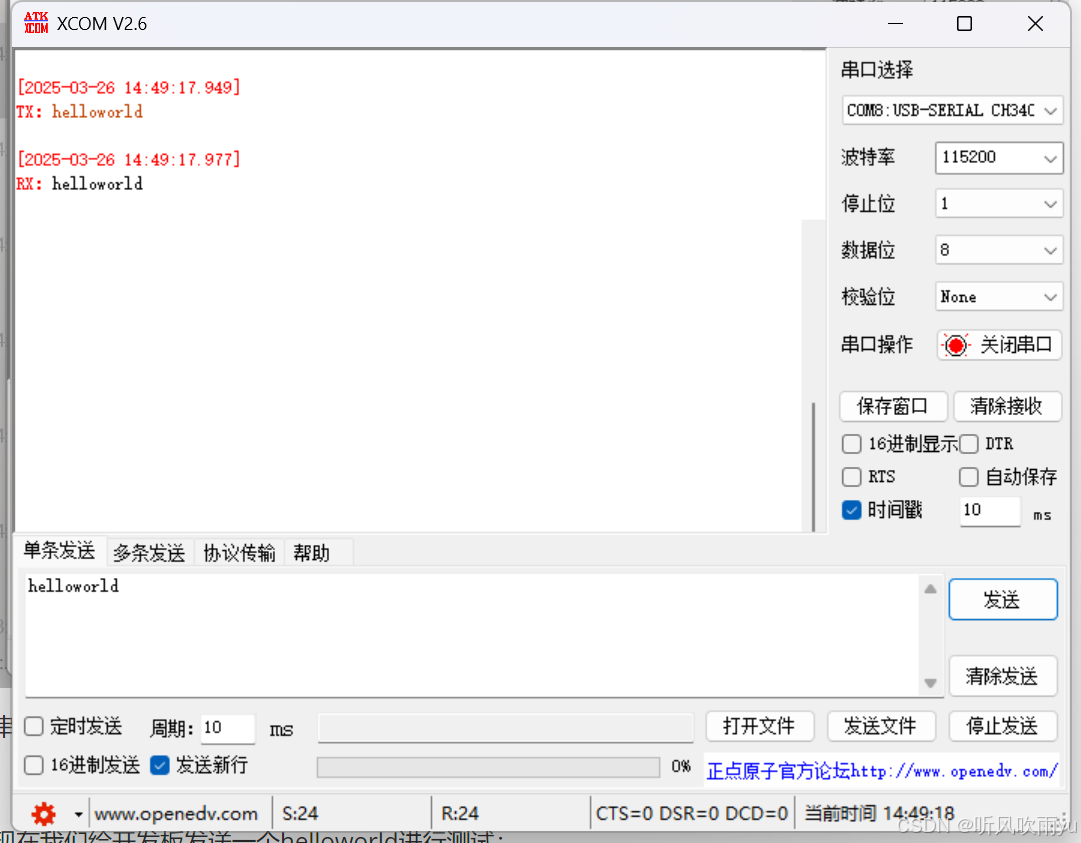
可以看到,开发板给了相同的回复
并且在终端正确的输出了日志:
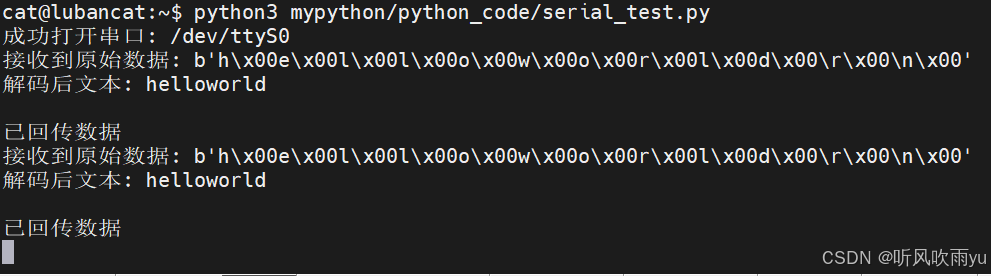
测试完成
按Ctrl+C终止代码运行
Ros2串口测试
Ros2中我准备了如下节点:
topic_serial_pub:串口发布者,该节点通过开启串口通讯 1.如若接收到串口,则将串口数据发送至·serial_data·话题 2.如果监听到·serial_send·话题数据,则将数据发送至串口
topic_serial_sub:串口接收测试节点 1.监听·serial_data·话题,如果监听到则将数据输出到控制台。
topic_serial_sendtest:串口发送测试节点| 1.定时将字符串发送至·serial_send·话题。
源码拷贝
下面是各节点源码:
topic_serial_pub
#!/usr/bin/env python3
# -*- coding: utf-8 -*-
import rclpy
from rclpy.node import Node
from std_msgs.msg import String
import serial
import serial.tools.list_ports
import threading
import time
class SerialPublisher(Node):
def __init__(self, name):
super().__init__(name)
# 创建发布者和订阅者
self.publisher_ = self.create_publisher(String, 'serial_data', 10)
self.subscription = self.create_subscription(
String,
'serial_send',
self.send_serial_callback,
10)
# 初始化串口
self.serial_port = None
self.init_serial('/dev/ttyS0', 115200) # 根据实际设备修改
# 启动串口读取线程
if self.serial_port and self.serial_port.is_open:
self.read_thread = threading.Thread(target=self.read_serial_async)
self.read_thread.daemon = True
self.read_thread.start()
def init_serial(self, port, baudrate):
"""初始化串口连接"""
try:
self.serial_port = serial.Serial(
port=port,
baudrate=baudrate,
bytesize=serial.EIGHTBITS,
parity=serial.PARITY_NONE,
stopbits=serial.STOPBITS_ONE,
timeout=0.01
)
if self.serial_port.is_open:
self.get_logger().info(f"成功打开串口 {port}")
except Exception as e:
self.get_logger().error(f"打开串口失败: {str(e)}")
def read_serial_async(self):
"""在单独线程中读取串口数据"""
while rclpy.ok() and self.serial_port and self.serial_port.is_open:
try:
# 检查接收缓冲区是否有数据
if self.serial_port.in_waiting > 0:
time.sleep(0.1) # 短暂休眠确保数据完整接收
# 读取所有可用数据
data = self.serial_port.read(self.serial_port.in_waiting)
if data:
# self.get_logger().info(f"接收到原始数据: {data}")
try:
# 使用 UTF-16 解码
decoded_data = data.decode('utf-16').strip()
self.data_received_callback(decoded_data)
except UnicodeDecodeError:
self.get_logger().warn("接收到非UTF-16格式数据")
except Exception as e:
self.get_logger().error(f"串口读取错误: {str(e)}")
def data_received_callback(self, data):
"""串口数据接收回调函数"""
msg = String()
msg.data = data
self.publisher_.publish(msg)
self.get_logger().info(f"发布数据: {data}")
def send_serial_callback(self, msg):
"""话题数据接收回调函数"""
if self.serial_port and self.serial_port.is_open:
try:
# 添加换行符保证数据完整性
send_data = msg.data + '\n'
# 使用 UTF-16 编码发送数据
self.serial_port.write(send_data.encode('utf-8'))
self.get_logger().info(f"发送数据: {msg.data}")
except Exception as e:
self.get_logger().error(f"串口发送失败: {str(e)}")
else:
self.get_logger().warn("尝试发送数据时串口未打开")
def destroy_node(self):
"""节点销毁时关闭串口"""
if self.serial_port and self.serial_port.is_open:
self.serial_port.close()
self.get_logger().info("串口已关闭")
super().destroy_node()
def main(args=None):
rclpy.init(args=args)
node = SerialPublisher("serial_publisher")
try:
rclpy.spin(node)
except KeyboardInterrupt:
pass
finally:
node.destroy_node()
rclpy.shutdown()
if __name__ == "__main__":
main()
topic_serial_sub
#!/usr/bin/env python3
# -*- coding: utf-8 -*-
import rclpy # ROS2 Python接口库
from rclpy.node import Node # ROS2 节点类
from std_msgs.msg import String # ROS2标准定义的String消息
"""
创建一个订阅者节点
"""
class SubscriberNode(Node):
def __init__(self, name):
super().__init__(name) # ROS2节点父类初始化
self.sub = self.create_subscription(\
String, "serial_data", self.listener_callback, 10) # 创建订阅者对象(消息类型、话题名、订阅者回调函数、队列长度)
def listener_callback(self, msg): # 创建回调函数,执行收到话题消息后对数据的处理
self.get_logger().info('I heard: "%s"' % msg.data) # 输出日志信息,提示订阅收到的话题消息
def main(args=None): # ROS2节点主入口main函数
rclpy.init(args=args) # ROS2 Python接口初始化
node = SubscriberNode("topic_serial_sub") # 创建ROS2节点对象并进行初始化
rclpy.spin(node) # 循环等待ROS2退出
node.destroy_node() # 销毁节点对象
rclpy.shutdown() # 关闭ROS2 Python接口
topic_serial_sendtest
#!/usr/bin/env python3
# -*- coding: utf-8 -*-
import rclpy # ROS2 Python接口库
from rclpy.node import Node # ROS2 节点类
from std_msgs.msg import String # 字符串消息类型
"""
创建一个发布者节点
"""
class PublisherNode(Node):
def __init__(self, name):
super().__init__(name) # ROS2节点父类初始化
self.pub = self.create_publisher(String, "serial_send", 10) # 创建发布者对象(消息类型、话题名、队列长度)
self.timer = self.create_timer(0.5, self.timer_callback) # 创建一个定时器(单位为秒的周期,定时执行的回调函数)
self.num = 0
def timer_callback(self): # 创建定时器周期执行的回调函数
msg = String() # 创建一个String类型的消息对象
msg.data = f'hello im3588 test{self.num}' # 填充消息对象中的消息数据
self.num += 1
self.pub.publish(msg) # 发布话题消息
self.get_logger().info('Publishing: "%s"' % msg.data) # 输出日志信息,提示已经完成话题发布
def main(args=None): # ROS2节点主入口main函数
rclpy.init(args=args) # ROS2 Python接口初始化
node = PublisherNode("topic_serial_sendtest") # 创建ROS2节点对象并进行初始化
rclpy.spin(node) # 循环等待ROS2退出
node.destroy_node() # 销毁节点对象
rclpy.shutdown() # 关闭ROS2 Python接口
将其放入到你的功能包里面,并且在setup.py里进行配置:
entry_points={
'console_scripts': [
'topic_serial_pub = main_package.topic_serial_pub:main',
'topic_serial_sub = main_package.topic_serial_sub:main',
'topic_serial_sendtest = main_package.topic_serial_sendtest:main',
],
接下来,编译功能包
colcon build
ROS2串口发送测试
首先打开两个终端,将终端进入工作空间内:
注意:下面的操作是两个终端都需要进行的操作:
注意:下面的操作是两个终端都需要进行的操作:
注意:下面的操作是两个终端都需要进行的操作:
例如我的为:
cd ProjectTrain/
然后,配置环境变量
source install/setup.bash

接下来就可以开始开启Ros节点了:
终端1执行:
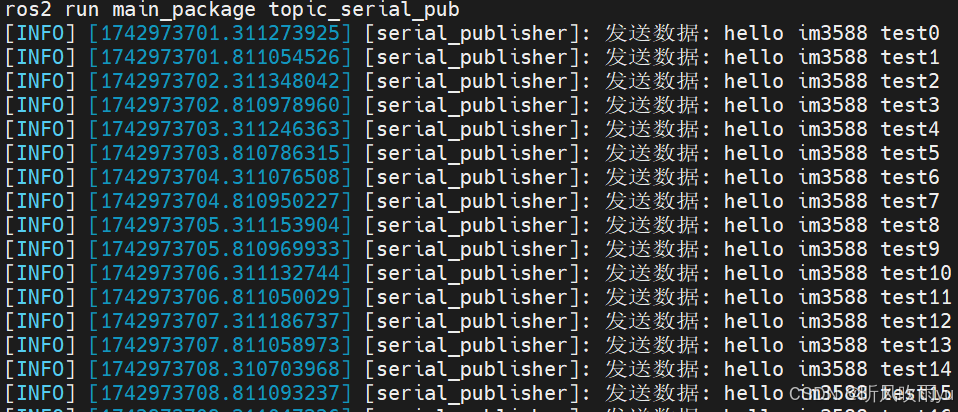
ros2 run main_package topic_serial_pub
终端2执行:
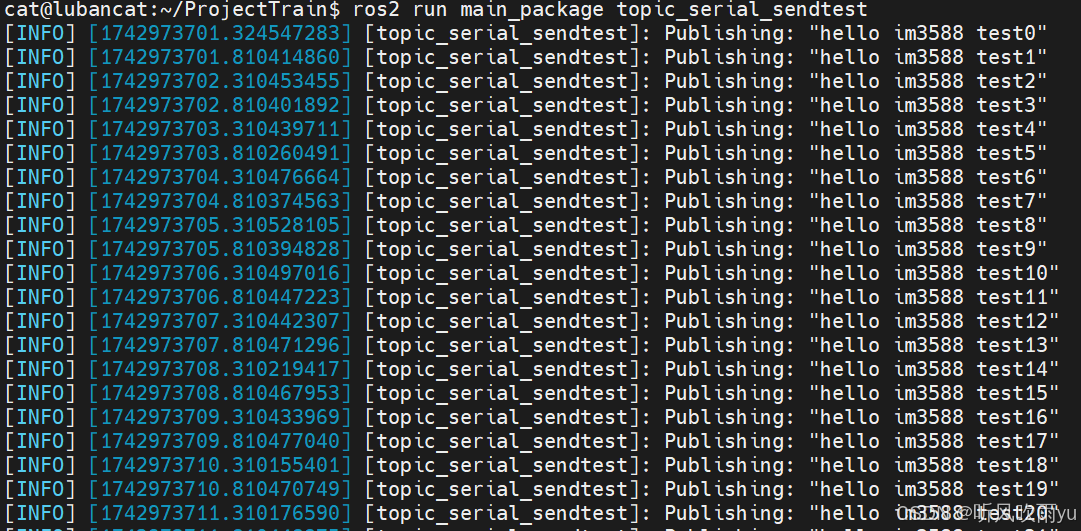
ros2 run main_package topic_serial_sendtest
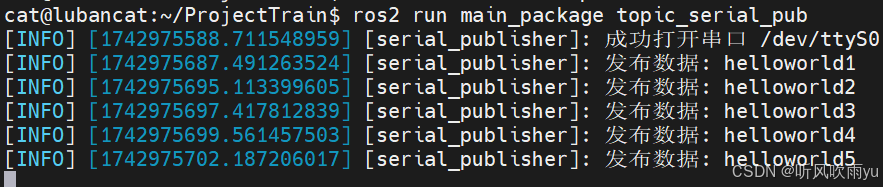
此时,就可以开始观察现象了: 终端1现象:
终端2现象:
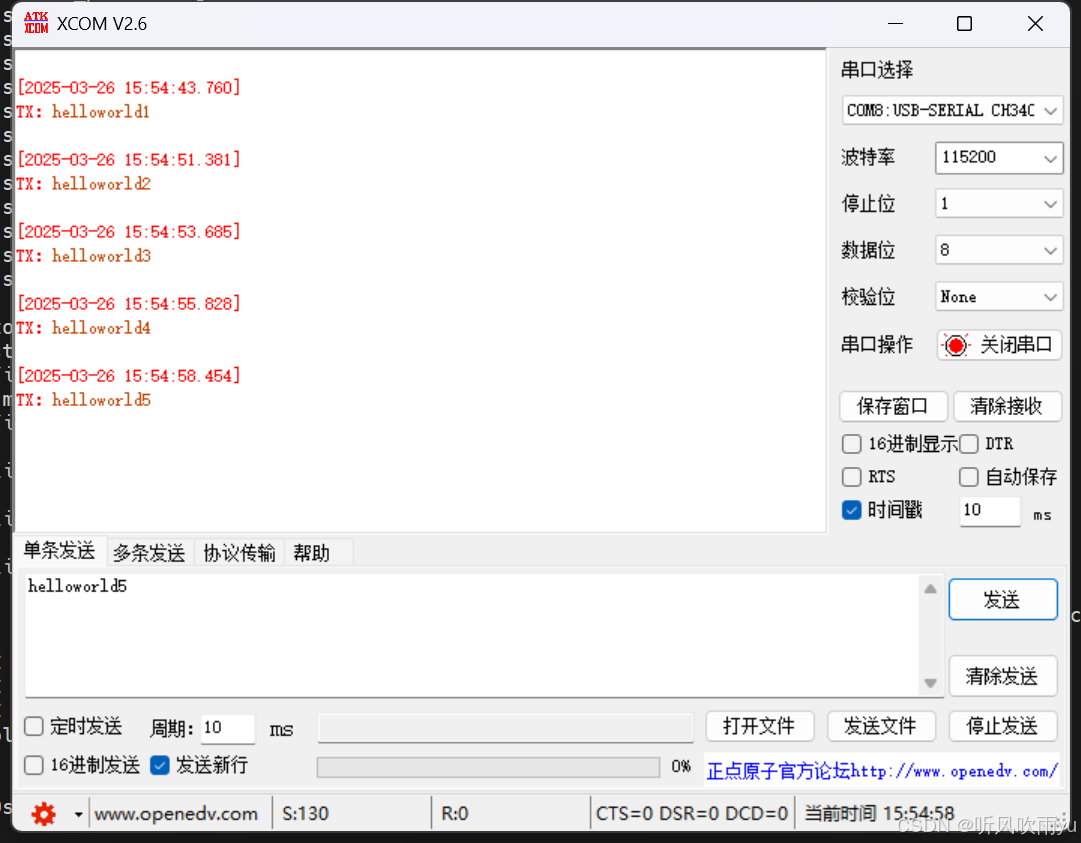
电脑串口助手现象:
此时,ROS2成功将串口发送。
在实际开发中,如若有需要通过串口发送出去给下位机等指令时,只需在serial_send话题发送数据即可。
ROS2串口接收测试
首先打开两个终端,将终端进入工作空间内:
注意:下面的操作是两个终端都需要进行的操作:
注意:下面的操作是两个终端都需要进行的操作:
注意:下面的操作是两个终端都需要进行的操作:
例如我的为:
cd ProjectTrain/
然后,配置环境变量
source install/setup.bash

接下来就可以开始开启Ros节点了:
终端1执行:
ros2 run main_package topic_serial_pub
终端2执行:
ros2 run main_package topic_serial_sendsub
此时,就可以开始观察现象了:
我们在串口助手里依次发送数据
终端1现象:
终端2现象:

此时,ROS2成功接收到串口。
在实际开发中,如若有需要通过串口读取下位机数据时,只需监听serial_data即可。