基于 RK3588 的码头门机抓斗智能视觉追踪系统
Git仓库链接:暂无
1. 项目概述
本项目是针对工业港口码头场景开发的嵌入式视觉系统,旨在解决门机作业中对**抓斗(Grab Bucket)**的实时定位与自动追踪难题。系统基于高性能嵌入式平台 Rockchip RK3588,深度整合了 YOLOv11-OBB/HBB 目标检测、ByteTrack 多目标追踪以及 PID 云台控制算法。
通过部署在门机前大梁上的云台相机,系统能够全天候自动识别抓斗位置、姿态,并控制云台进行平滑、稳定的实时跟踪,为港口自动化作业提供关键的视觉引导与状态监测能力。
2. 应用场景与痛点解决
- 场景:大型港口门座式起重机(门机),相机高空俯拍。
- 痛点:
- 抓斗在作业过程中存在大幅度摇摆和旋转。
- 工业现场环境复杂,存在遮挡干扰,容易丢失目标。
- 嵌入式端算力受限,难以兼顾高帧率检测与低延迟控制。
- 解决方案:利用 YOLOv11-OBB/HBB 实现高精度旋转框检测,结合多线程 NPU 加速与 PID 闭环控制,实现“既看得准,又跟得稳”。
3. 核心技术架构
3.1 感知层:YOLOv11-OBB & NPU 加速
- 旋转框检测:针对抓斗的不规则旋转特性,采用 YOLOv11-OBB (Oriented Bounding Box) 模型,相比传统水平框,能更紧密地贴合抓斗边缘,显著提升定位精度。
- NPU 异构计算:利用 RK3588 内置的 6TOPS NPU,通过
rknn_api直接调用硬件加速。 - 多线程并发:设计了 3-Worker 并行推理架构,充分榨干 NPU 的 3 个核心,大幅提升系统吞吐量(FPS)。
3.2 调度层:帧同步与乱序重排
为了解决多线程推理导致的“结果返回乱序”问题(即后采集的帧先推理完成),设计了基于 Frame ID 的轻量级调度器。
- 核心逻辑:
- 帧绑定:采集时将图像与全局递增的
frame_id绑定。 - 局部排序:主线程维护一个缓冲区,对 Worker 返回的乱序结果进行重排。
- 追新补空:优先处理最新帧;若中间出现丢帧,自动触发追踪器的预测模式(Predict Only)以保持算法状态连续。
- 帧绑定:采集时将图像与全局递增的
3.3 追踪层:ByteTrack & 轨迹预测
- ByteTrack 算法:采用关联匹配策略,有效处理抓斗被部分遮挡或短暂消失的情况,保证 ID 不跳变。
- OBB 适配:实现了从旋转框(OBB)到追踪器所需格式的转换适配。
- 轨迹平滑:引入卡尔曼滤波(Kalman Filter)对抓斗运动轨迹进行平滑预测,减少检测抖动对控制系统的影响。
3.4 控制层:自适应 PID 云台控制
- 双环 PID:实现了 PTZ(云台转动) 和 Zoom(变焦) 的双重 PID 闭环控制。
- 长焦优化:设计了速度自适应衰减算法。当相机处于长焦(高倍率)状态时,自动降低云台转动速度,防止画面剧烈晃动,确保远距离追踪的稳定性。
- VISCA 协议:通过 TCP 网络发送 VISCA 指令,直接驱动工业级云台相机。
4. 关键代码展示
以下代码展示了项目中核心的 多线程乱序重排与调度逻辑,这是保证系统低延迟与高可靠性的关键(摘自 src/main.cpp):
cpp
// 主循环:负责结果调度与 PID 控制逻辑
while (g_running)
{
// 1. 获取所有 Worker 检测到的目标(可能乱序)
std::vector<DetectedTarget> incoming_targets;
{
std::lock_guard<std::mutex> lock(g_target_mutex);
if (!g_detected_targets.empty()) {
incoming_targets = g_detected_targets;
g_detected_targets.clear(); // 清空缓冲区
}
}
// 2. 按 frame_id 分组进行局部排序
// 使用 map 自动排序: frame_id -> targets
std::map<uint64_t, std::vector<DetectedTarget>> batch_map;
for (const auto& t : incoming_targets) {
batch_map[t.frame_id].push_back(t);
}
// 3. 遍历处理排序后的数据
for (auto& kv : batch_map) {
uint64_t current_id = kv.first;
std::vector<DetectedTarget>& targets = kv.second;
// 初始化 last_processed_frame_id
if (last_processed_frame_id == 0) {
last_processed_frame_id = current_id - 1;
}
// 策略 A: 过期帧 (迟到了) -> 丢弃,保证实时性
if (current_id <= last_processed_frame_id) {
continue;
}
// 策略 B: 缺帧 (中间有空缺) -> 补空帧预测,维持 ByteTrack 状态
// 例如 last=100, current=103, 则补 101, 102 的预测
while (last_processed_frame_id + 1 < current_id) {
last_processed_frame_id++;
#ifdef ENABLE_BYTETRACK
std::vector<Object> empty_objects;
tracker.update(empty_objects); // 纯预测更新
#endif
}
// 策略 C: 正常处理当前帧
// ... (执行 ByteTrack 更新与 PID 控制) ...
// 更新状态
last_processed_frame_id = current_id;
}
// 控制循环频率
std::this_thread::sleep_for(std::chrono::milliseconds(ptzController.get_ptz_control_interval()));
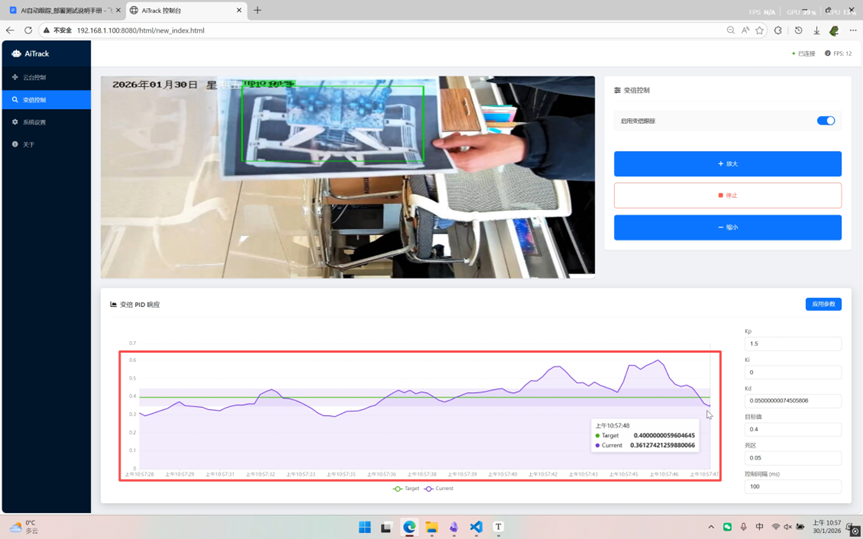
}5. 系统功能与交互
- Web 管理后台:基于
httplib开发,支持参数热更新(PID系数、追踪灵敏度)、系统重启及状态监控。 - 实时预览:支持通过 WebSocket 推送 JPEG 流,或通过 UDP 协议向上位机推送带检测框的调试视频流。
- 配置持久化:支持 JSON 格式的配置文件读写,方便现场部署与调试。
6. 技术栈
- 硬件平台:Rockchip RK3588
- 开发语言:C++17
- AI 推理:RKNPU2, YOLOv11-OBB
- 算法库:OpenCV, ByteTrack, Eigen
- 网络/通信:WebSocket++, TurboJPEG, VISCA over TCP
- 开发环境:Linux (Ubuntu), CMake, VSCode
7.相关截图